





I-FT-37RGM545 Round Spur gear motor enokwehliswa kwegiya







Izici:
Kwa-Forto, sizibophezele ekunikezeni izixazululo zekhwalithi ephezulu ezedlula lokho okulindelwe ngamakhasimende ethu. Amabhokisi ethu angu-37mm circular spur ahlanganisa ubuchwepheshe obuphambili, ukwethembeka kanye nokuguquguquka ukuze akunikeze isisombululo esifanele sezinhlelo zakho zokusebenza zokushayela imoto.
Idatha ye-Gearbox:
| Uchungechunge lwegiya | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Isilinganiso sokunciphisa (K) | 6.8, 10 | 20, 30, 40, 46 | 61,90 100.103 | 115, 138, 160, 163, 184, 270, 300 | 310,414,552,614 641,810,900 | 932, 1243, 1657 2430,2700 | ||||||
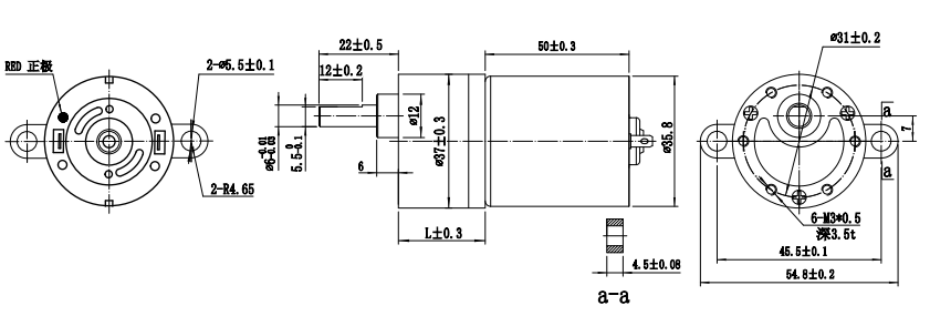
| Ubude bebhokisi legiyaL(mm) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| I-torque elinganiselwe (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| I-torque esheshayo (kg · cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Ukusebenza kahle kwe-gearbox (%) | 81% | 73% | 65% | 59% | 53% | 48% | ||||||
Idatha ye-Gearbox:
| Imodeli Yezimoto | I-Voltage elinganiselwe | Awukho Umthwalo | Layisha | Isitolo | ||||||||
| Isivinini | Okwamanje | Isivinini | Okwamanje | Okukhiphayo | Torque | Okwamanje | Torque | |||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Isicelo
I-Round Spur gear motor inezici zosayizi omncane, isisindo esilula nokusebenza kahle kokudlulisela phambili, futhi isetshenziswa kabanzi emishinini emincane ehlukahlukene. Nazi ezinye izimo zohlelo lokusebenza ezijwayelekile:
Amathoyizi ahlakaniphile: Ama-Miniature DC spur gear motors angashayela izenzo ezihlukahlukene zamathoyizi ahlakaniphile, njengokuphenduka, ukushwibeka, ukusunduza, njll., ukuletha imisebenzi ehlukahlukene nethakazelisayo kumathoyizi.
Amarobhothi: I-miniaturization kanye nokusebenza kahle okuphezulu kwamamothoni amancane we-DC spur gear kuwenza abe yingxenye ebalulekile yenkundla yamarobhothi. Ingasetshenziselwa i-robot joint actuation, ukunyakaza kwesandla nokuhamba, njll.
Iphrofayela Yenkampani




-

I-FT-37RGM3530 37mm Spur gear motor Axis emaphakathi
-

I-FT-37RGM3530 37mm gearbox DC spur gear motor
-

I-FT-37RGM545 Umsindo wetorque ephezulu ophansi 37mm Spur gea...
-

I-FT-37RGM3530 37mm Spur Gear Motor
-

I-FT-37RGM31ZY 37mm eyindilinga ye-spur gearmotor 31ZY tu...
-

I-FT-37RGM3540 37mm Spur gear motor 350 motor wit...