





אין מעטשאַניקאַל אָטאַמיישאַן באַוועגונג, די מאָטאָר איז אַ ינדיספּענסאַבאַל קאָמפּאָנענט. אין די קלאַסאַפאַקיישאַן פון מאָטאָרס, די מערסט פּראָסט און וויכטיק מאָטאָרס זענעןדק גאַנג מאָטאָרסאון סטעפּער מאָטאָרס. כאָטש זיי זענען ביידע מאָטאָרס, עס זענען גרויס דיפעראַנסיז צווישן די צוויי. די פאלגענדע וועט פאָרשטעלן די חילוק צווישן דק רעדוקציע מאָטאָרס און סטעפּער מאָטאָרס אין דעטאַל.
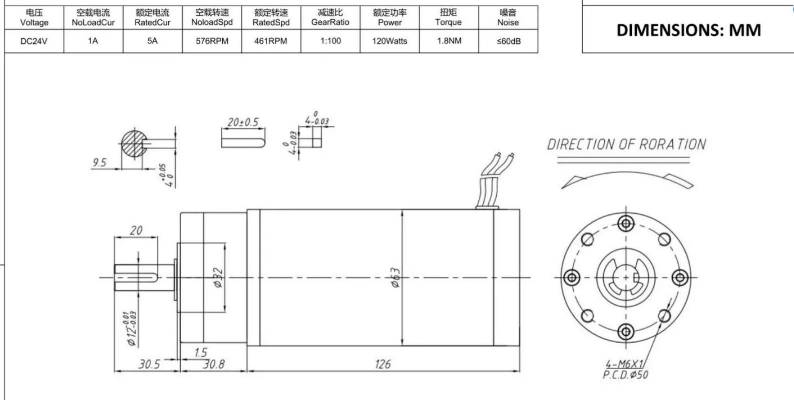
דק רעדוקציע מאָטאָר


1. ארבעטן פּרינציפּ
דידק גאַנג מאָטאָרענדערונגען די פּאָולעראַטי פון די מאַגנעטיק פעלד ין די מאָטאָר דורך די positive און נעגאַטיוו קראַנט פון די פונדרויסנדיק קראַנט, דערמיט ריאַלייזינג די ראָוטיישאַן פון די מאָטאָר. דער רעזולטאַט שטיל פון דידק גירד מאָטאָראיז ינאַגרייטיד מיט אַ רעדוסער צו רעדוצירן די רעזולטאַט ראָוטיישאַן גיכקייַט און פאַרגרעסערן די טאָרק פון די מאָטאָר צו ענשור אַז דער מאָטאָר קענען אַדאַפּט צו די מאַסע.
2. פֿעיִקייטן
דידק גאַנג מאָטאָר האט הויך עפעקטיווקייַט, אַ ברייט אַרבעט קייט און נידעריק געלטיק ווערט. עס איז דער הויפּט פּאַסיק פֿאַר אַפּלאַקיישאַן סינעריאָוז וואָס דאַרפן הויך טאָרק, אַזאַ ווי מעטשאַניקאַל לאָודז און אָטאַמאַטיק קאָנטראָל סיסטעמען, אָבער אין דער זעלביקער צייט, רעכט צו זיין גרויס ילעקטראָומאַגנעטיק אָנווער, וישאַלט און טראָובלעשאָאָטינג דאַרפן זיכער פאַכמאַן סקילז.
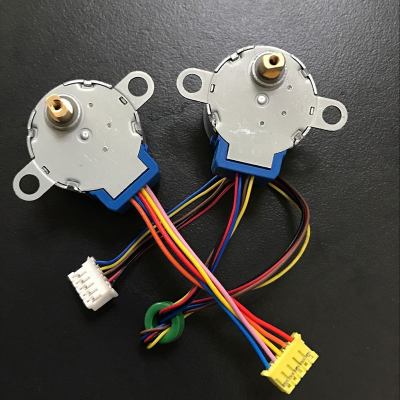
סטעפּער מאָטאָר
אַרבעט פּרינציפּ 1.
א סטעפּער מאָטאָר דרייווז די מאָטאָר צו דרייען אין אַ זיכער ווינקל דורך קאַנטיניואַסלי טשאַנגינג די פּאָולעראַטי פון זייַן ילעקטראָומאַגנעטיק פעלד ווען פּאַוערד אויף. עס איז צעטיילט אין צוויי טייפּס: איינער איז אַ איין-פאַסע סטעפּער מאָטאָר און די אנדערע איז אַ דריי-פאַסע סטעפּער מאָטאָר. דער רעזולטאַט שטיל פון די סטעפּער מאָטאָר איז קאַמביינד מיט אַ קאַנווערטער אָדער אַ רעדוסער צו קאָנטראָלירן די ווינקל און גיכקייַט.
פֿעיִקייטן
סטעפּער מאָטאָרס האָבן הויך פּינטלעכקייַט, גענוי קאָנטראָל, און קענען ריסטאַרט און אָנהייבן אויטאָמאַטיש. זיי זענען דער הויפּט פּאַסיק פֿאַר אַפּלאַקיישאַן סינעריאָוז מיט הויך-פּינטלעכקייַט קאָנטראָל רעקווירעמענץ, אַזאַ ווי דיגיטאַל פּרינטערס, לאַזער סקאַנערז און לקד דיספּלייז. אָבער, אין דער זעלביקער צייט, זינט די סטעפּער מאָטאָר פאָר שטיל האט מעטשאַניקאַל ראַש, סטעפּער מאָטאָרס זענען נישט דער בעסטער ברירה ווען נידעריק ראַש אָפּעראַציע איז פארלאנגט.
די חילוק צווישן דק רעדוקציע מאָטאָר און סטעפּער מאָטאָר
| דיפפערענסעס | דק גאַנג מאָטאָר | סטעפּער מאָטאָר |
| אַרבעט פּרינציפּ | טוישן די פּאָולעראַטי פון די מאַגנעטיק פעלד אין די מאָטאָר דורך אַפּלייינג positive און נעגאַטיוו קראַנט
| דורך קאַנטיניואַסלי טשאַנגינג די פּאָולעראַטי פון זייַן ילעקטראָומאַגנעטיק פעלד ווען פּאַוערד אויף, דער מאָטאָר איז געטריבן צו פּראָדוצירן אַ זיכער ראָוטיישאַן ווינקל |
| רעזולטאַט שטיל | ינטעגראַטעד רעדוסער צו רעדוצירן די רעזולטאַט ראָוטיישאַן גיכקייַט און פאַרגרעסערן די טאָרק פון די מאָטאָר | קאַמביינד מיט אַ קאַנווערטער אָדער רעדוסער, עס קענען קאָנטראָלירן די ווינקל און גיכקייַט |
| אַפּפּליקאַטיאָן סינעריאָוז | פּאַסיק פֿאַר סינעריאָוז וואָס דאַרפן הויך טאָרק אַזאַ ווי מעטשאַניקאַל לאָודז און אָטאַמאַטיק קאָנטראָל סיסטעמען | פּאַסיק פֿאַר הויך-פּינטלעכקייַט קאָנטראָל און ריסטאַרט זיך-סטאַרטינג אַפּלאַקיישאַן סינעריאָוז, אַזאַ ווי דיגיטאַל פּרינטערס, לאַזער סקאַנערז, לקד דיספּלייז |
| אַדוואַנטאַגעס | הויך עפעקטיווקייַט, ברייט ארבעטן קייט, נידעריק געלטיק ווערט | הויך פּינטלעכקייַט, גענוי קאָנטראָל, און קעסיידערדיק ריסטאַרט זיך-סטאַרטינג |
| דיסאַדוואַנטידזשיז | הויך ילעקטראָומאַגנעטיק טראָגן, ריקוויירינג פאַכמאַן סקילז פֿאַר וישאַלט און טראָובלעשאָאָטינג | די פאָר שטיל האט מעטשאַניקאַל ראַש |
מסקנא
בקיצור,דק גאַנג מאָטאָרס און סטעפּער מאָטאָרס האָבן זייער אייגענע אַדוואַנטידזשיז און דיסאַדוואַנטידזשיז, און זייער אַפּלאַקיישאַן סינעריאָוז זענען אויך אַנדערש. פֿאַר עטלעכע סינעריאָוז וואָס דאַרפן הויך בייגיקייט קאָנטראָל און הויך פּינטלעכקייַט, אַזאַ ווי וועלדינג ראָובאַץ און קנק, סטעפּער מאָטאָר קאָנטראָל איז בכלל געניצט, בשעת סינעריאָוז וואָס דאַרפן שנעל, עפעקטיוו, פאַרלאָזלעך און ניט זייער הויך פּינטלעכקייַט רעקווירעמענץ, אַזאַ ווי פֿאַרזאַמלונג ליניע קאַנווייערז, זענען בכלל קאַנטראָולד דורך דק רעדוקציע מאָטאָרס.
פּאָסטן צייט: 18 אקטאבער 2024