





I-FT-37RGM545 Round Spur gear motor kunye nokunciphisa izixhobo







Iimbonakalo:
E-Forto, sizibophelele ekuboneleleni ngezisombululo ezikumgangatho ophezulu ezingaphaya kolindelo lwabathengi bethu. Iibhokisi zethu ze-37mm ezijikelezayo zidibanisa itekhnoloji yokusika, ukuthembeka kunye nokuguquguquka ukubonelela ngesisombululo esifanelekileyo kwizicelo zakho zokuqhuba imoto.
Idatha yeGearbox:
| Gear series | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Umlinganiselo wokunciphisa (K) | 6.8, 10 | 20, 30, 40, 46 | 61,90 100.103 | 115, 138, 160, 163, 184, 270, 300 | 310,414,552,614 641,810,900 | 932, 1243, 1657 2430, 2700 | ||||||
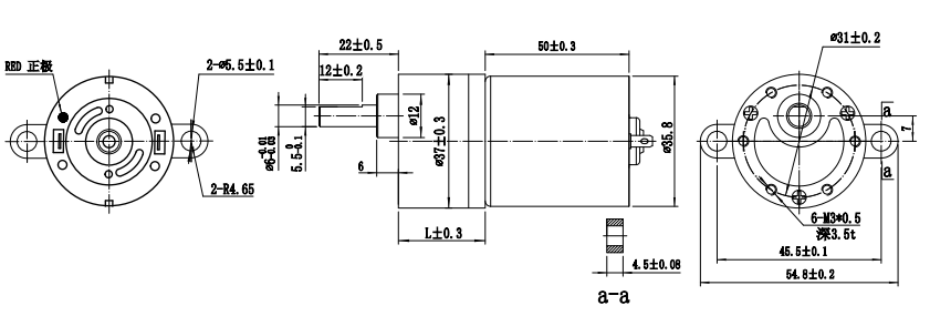
| Ubude bebhokisi yegiyaL(mm) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| I-torque elinganisiweyo (kg · cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Itorque yangoko (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Ukusebenza kakuhle kwebhokisi yegiya (%) | 81% | 73% | 65% | 59% | 53% | 48% | ||||||
Idatha yeGearbox:
| Imodeli yeMoto | Ulinganiso lweVoltage | Akukho Mthwalo | Layisha | Yima | ||||||||
| Isantya | Okwangoku | Isantya | Okwangoku | Isiphumo | Torque | Okwangoku | Torque | |||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Isicelo
I-Round Spur gear motor ineempawu zobungakanani obuncinci, ubunzima obukhanyayo kunye nokusebenza kakuhle kokuhanjiswa, kwaye isetyenziswa kakhulu kwizixhobo ezahlukeneyo zoomatshini. Nazi ezinye iimeko zesicelo eziqhelekileyo:
Izinto zokudlala eziSmart: Iimoto ezincinci ze-DC spur gear zinokuqhuba izinto ezahlukeneyo zokudlala ezihlakaniphile, ezinje ngokujika, ukujinga, ukutyhala, njl.njl., ukuzisa imisebenzi eyahlukeneyo kunye nenomdla kwizinto zokudlala.
Iirobhothi: Ukwenziwa kweminiaturization kunye nokusebenza okuphezulu kweemotor ze-DC spur gear zibenza babe yinxalenye ebalulekileyo yecandelo lerobhothi. Ingasetyenziselwa i-robot joint actuation, ukunyakaza kwesandla kunye nokuhamba, njl.
Iprofayile yekhampani









