





FT-37RGM3530 37mm Spur gear motor Axis embindini





Iimbonakalo:
Injini yegiya ye-spur ephakathi ngokubanzi ibhekisa kwimoto apho ishaft ephumayo ilungelelaniswe ne-motor shaft, okuthetha ukuba zombini zibekwe kumbindi wendlu yemoto.
Olu lungelelwaniso luvumela uyilo oludityanisiweyo kunye nogqithiso lwamandla olusebenzayo. Kolu kuseto, amandla ajikelezayo emoto ahanjiswa ngokuthe ngqo kwishaft ephumayo ngothotho lweegiya, ngokukodwa iigiya ezikhuthazayo.
Ividiyo yeMveliso
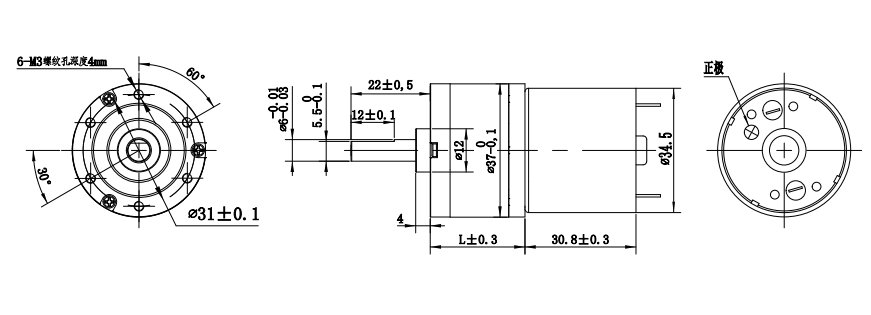
UMZOBI(MM)
Idatha yeGearbox:
| Gear series | 3 | 4 | 5 | 6 | 7 | 8 | ||||||
| Umlinganiselo wokunciphisa (K) | 10.6 | 24.4 | 42.7 | 74.7 | 130.8 | 228 | ||||||
| Ubude bebhokisi yegiyaL(mm) | 23 | 26.3 | 28.8 | 31.7 | 34.5 | 37.3 | ||||||
| I-torque elinganisiweyo (kg · cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Itorque yangoko (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Ukusebenza kakuhle kwebhokisi yegiya (%) | 73% | 65% | 58% | 52% | 47% | 42% | ||||||
Idatha yeMoto:
| Imodeli yeMoto | Akukho Mthwalo | Layisha | Yima | |||||||||
| Ulinganiso lweVoltage | Isantya | Okwangoku | Isantya | Okwangoku | Isiphumo | Torque | Okwangoku | Torque | ||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-3530 | 12 | 3000 | 60 | 2550 | 170 | 2.04 | 20 | 460 | 200 | |||
| FT-3530 | 12 | 6000 | 70 | 4500 | 350 | 4.2 | 110 | 2300 | 440 | |||
| FT-3530 | 24 | 4500 | 40 | 3300 | 150 | 3.6 | 50 | 700 | 270 | |||
| FT-3530 | 24 | 6000 | 40 | 4500 | 200 | 4.8 | 100 | 1400 | 400 | |||
Isicelo
I-Round Spur gear motor ineempawu zobungakanani obuncinci, ubunzima obukhanyayo kunye nokusebenza kakuhle kokuhanjiswa, kwaye isetyenziswa kakhulu kwizixhobo ezahlukeneyo zoomatshini. Nazi ezinye iimeko zesicelo eziqhelekileyo:
Izinto zokudlala eziSmart: Iimoto ezincinci ze-DC spur gear zinokuqhuba izinto ezahlukeneyo zokudlala ezihlakaniphile, ezinje ngokujika, ukujinga, ukutyhala, njl.njl., ukuzisa imisebenzi eyahlukeneyo kunye nenomdla kwizinto zokudlala.
Iirobhothi: Ukwenziwa kweminiaturization kunye nokusebenza okuphezulu kweemotor ze-DC spur gear zibenza babe yinxalenye ebalulekileyo yecandelo lerobhothi. Ingasetyenziselwa i-robot joint actuation, ukunyakaza kwesandla kunye nokuhamba, njl.
Iprofayile yekhampani









