





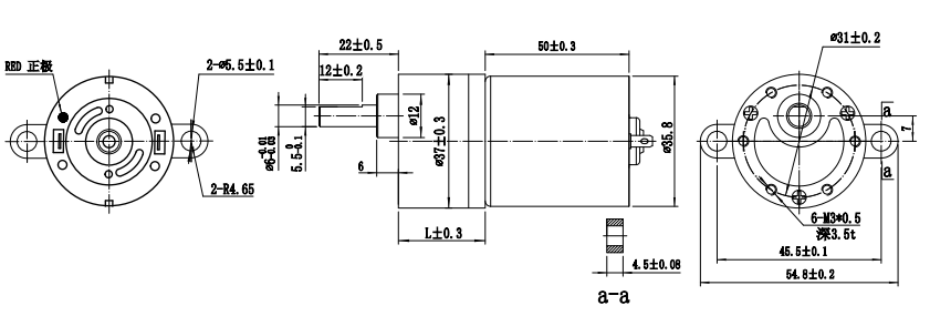
FT-37RGM545 Round Spur gear motor na may gear reduction







Mga Tampok:
Sa Forto, nakatuon kami sa pagbibigay ng mga de-kalidad na solusyon na lampas sa inaasahan ng aming mga customer. Ang aming 37mm circular spur gearboxes ay pinagsasama ang makabagong teknolohiya, pagiging maaasahan at versatility upang maibigay ang perpektong solusyon para sa iyong mga application ng motor drive.
Data ng Gearbox:
| Serye ng gear | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Reduction ratio(K) | 6.8, 10 | 20, 30, 40, 46 | 61, 90 100.103 | 115, 138, 160, 163, 184, 270, 300 | 310、414、552、614 641,810,900 | 932、1243、1657 2430, 2700 | ||||||
| Haba ng gearboxL(mm) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| Na-rate na metalikang kuwintas(kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Instant torque(kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Episyente ng gearbox(%) | 81% | 73% | 65% | 59% | 53% | 48% | ||||||
Data ng Gearbox:
| Modelo ng Motor | Na-rate na Boltahe | Walang Load | Magkarga | stall | ||||||||
| Bilis | Kasalukuyan | Bilis | Kasalukuyan | Output | Torque | Kasalukuyan | Torque | |||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Aplikasyon
Ang Round Spur gear motor ay may mga katangian ng maliit na sukat, magaan ang timbang at mataas na kahusayan sa paghahatid, at malawakang ginagamit sa iba't ibang micro mechanical equipment. Narito ang ilang karaniwang mga sitwasyon ng application:
Mga matalinong laruan: Ang mga miniature na DC spur gear na motor ay maaaring magmaneho ng iba't ibang pagkilos ng mga matalinong laruan, tulad ng pagliko, pag-indayog, pagtulak, atbp., na nagdadala ng mas magkakaibang at kawili-wiling mga function sa mga laruan.
Mga Robot: Ang miniaturization at mataas na kahusayan ng mga pinaliit na DC spur gear motor ay ginagawa silang isang mahalagang bahagi ng larangan ng robotics. Maaari itong magamit para sa robot joint actuation, paggalaw ng kamay at paglalakad, atbp.
Profile ng Kumpanya









