





Дар ҳаракати автоматикунонии механикӣ муҳаррик ҷузъи ҷудонашаванда мебошад. Дар таснифи моторҳо муҳаррикҳои маъмултарин ва муҳимтарин мебошандМоторҳои фишанги DCва моторҳои қадам. Гарчанде ки онҳо ҳарду муҳаррик мебошанд, байни ин ду фарқиятҳои калон мавҷуданд. Дар зер фарқияти байни муҳаррикҳои коҳишдиҳандаи DC ва муҳаррикҳои қадам ба таври муфассал муаррифӣ карда мешаванд.
муҳаррики коҳиши DC


1. Принсипи кор
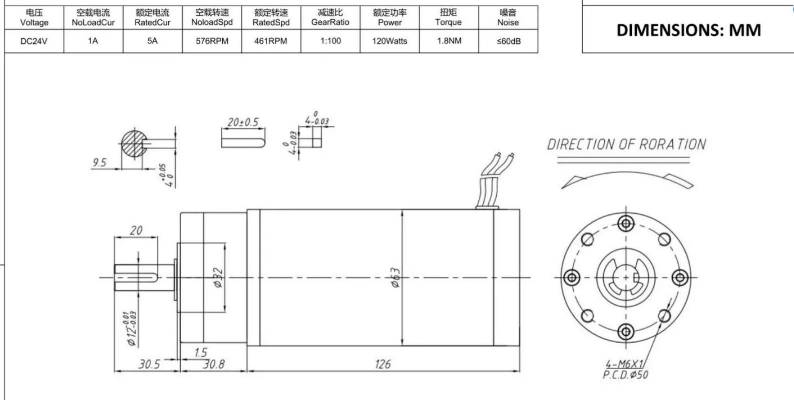
Дармуҳаррики фишанги DCқутбнокии майдони магнитии дохили муҳаррикро тавассути ҷараёни мусбат ва манфии ҷараёни берунӣ тағйир медиҳад ва бо ҳамин гардиши моторро амалӣ мекунад. Чоҳи баромадимуҳаррики фишанги DCбо редуктор барои кам кардани суръати гардиши баромад ва зиёд кардани моменти мотор муттаҳид карда шудааст, то боварӣ ҳосил кунад, ки муҳаррик метавонад ба сарборӣ мутобиқ шавад.
2. Хусусиятҳо
Дармуҳаррики фишанги DC самараи баланд, доираи васеи кор ва арзиши пулии паст дорад. Он махсусан барои сенарияҳои татбиқе, ки моменти баландро талаб мекунанд, мувофиқ аст, ба монанди бори механикӣ ва системаҳои идоракунии автоматӣ, аммо дар айни замон, аз сабаби талафоти зиёди электромагнитӣ, нигоҳдорӣ ва бартараф кардани мушкилот малакаҳои муайяни касбиро талаб мекунанд.
Мотори қадам
Принсипи кор 1.
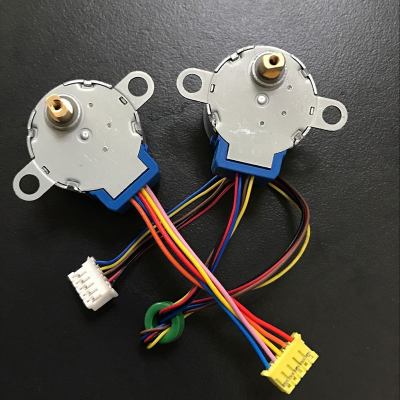
Моторе, ки қадгиранда аст, муҳаррикро ба як кунҷи муайян бо роҳи пайваста тағир додани полярии майдони электромагнитии он ҳангоми фурӯзон табдил медиҳад. Он ба ду намуд тақсим мешавад: яке муҳаррики қадами якфаза ва дигаре муҳаррики сефазаӣ. Чоҳи баромади муҳаррики қадам бо конвертер ё редуктор барои назорат кардани кунҷ ва суръат муттаҳид карда мешавад.
Вижагиҳо
Моторҳои Stepper дорои дақиқии баланд, назорати дақиқ мебошанд ва метавонанд ба таври худкор аз нав оғоз ва оғоз кунанд. Онҳо махсусан барои сенарияҳои барномавӣ бо талаботи назорати дақиқи баланд, аз қабили принтерҳои рақамӣ, сканерҳои лазерӣ ва дисплейҳои LCD мувофиқанд. Бо вуҷуди ин, дар айни замон, азбаски чоҳи гардонандаи муҳаррики қадамдор дорои садои механикӣ аст, муҳаррикҳои қадам ҳангоми зарурати кори пасти садо беҳтарин интихоб нестанд.
Фарқи байни муҳаррики коҳиши DC ва муҳаррики қадам
| Фарқиятҳо | муҳаррики фишанги DC | Мотори қадам |
| Принсипи кор | Қутбнокии майдони магнитии дохили муҳаррикро тавассути татбиқи ҷараёни мусбат ва манфӣ тағир диҳед
| Бо пайваста тағир додани қутби майдони электромагнитии худ ҳангоми фурӯзон, муҳаррик барои ба вуҷуд овардани кунҷи муайяни гардиш ронда мешавад. |
| Шабакаи баромад | Редуктори интегралӣ барои кам кардани суръати гардиши баромад ва баланд бардоштани моменти мотор | Дар якҷоягӣ бо конвертер ё редуктор, он метавонад кунҷ ва суръатро назорат кунад |
| Сенарияҳои татбиқ | Муносиб барои сенарияҳое, ки моменти баландро талаб мекунанд, ба монанди бори механикӣ ва системаҳои идоракунии автоматӣ | Муносиб барои назорати дақиқи баланд ва аз нав оғоз кардани сенарияҳои барномавии худкор, ба монанди принтерҳои рақамӣ, сканерҳои лазерӣ, дисплейҳои LCD |
| Афзалиятҳо | Самаранокии баланд, доираи васеи кор, арзиши пасти пулӣ | Дақиқии баланд, назорати дақиқ ва бозоғозкунии доимии худкор |
| Камбудиҳо | Фарсудашавии баланди электромагнитӣ, ки барои нигоҳдорӣ ва бартараф кардани мушкилот малакаҳои касбиро талаб мекунад | Дар чоҳи гардонанда садои механикӣ дорад |
Хулоса
Кӯтоҳаш,Моторҳои фишанги DC ва муҳаррикҳои қадамӣ афзалиятҳо ва нуқсонҳои худро доранд ва сенарияҳои татбиқи онҳо низ гуногунанд. Барои баъзе сенарияҳое, ки назорати чандирии баланд ва дақиқии баландро талаб мекунанд, ба монанди роботҳои кафшерӣ ва CNC, идоракунии мотори қадамӣ одатан истифода мешавад, дар ҳоле ки сенарияҳое, ки талаботҳои зуд, самаранок, боэътимод ва на он қадар баландро талаб мекунанд, ба монанди конвейерҳои хати васлкунӣ, умуман аз ҷониби муҳаррикҳои коҳиши DC назорат.
Вақти фиристодан: октябр-18-2024