





FT-37RGM31ZY 37mm pande zote spur gearmotor 31ZY injini tubular

Vipengele:
Kuongeza kisanduku cha gia kwenye motor isiyo na brashi ya DC huruhusu kuzidisha torque na kupunguza kasi.

MAELEZO
Vipimo ni vya kumbukumbu tu. Wasiliana nasi kwa data iliyobinafsishwa.
| Nambari ya mfano | Iliyokadiriwa volt. | Hakuna mzigo | Mzigo | Kusimama | |||||
| Kasi | Ya sasa | Kasi | Ya sasa | Torque | Nguvu | Ya sasa | Torque | ||
| rpm | mA(kiwango cha juu) | rpm | mA(kiwango cha juu) | Kgf.cm | W | mA(dakika) | Kgf.cm | ||
| FT-32RGM38500610500-13K | 6V | 807 | 1000 | 601 | 3600 | 0.91 | 5.61 | 6800 | 3.3 |
| FT-32RGM3850129000-83K | 12V | 110 | 360 | 90 | 1300 | 2.7 | 2.49 | 3000 | 12 |
| FT-32RGM38502411000-61K | 24V | 180 | 300 | 170 | 780 | 2 | 3.49 | 6500 | 20 |
| FT-32RGM3850247000-61K | 24V | 115 | 160 | 104 | 280 | 1.5 | 1.60 | 1800 | 11.5 |
| FT-32RGM38502411000-83K | 24V | 134 | 300 | 102 | 850 | 5 | 5.23 | 4000 | 23 |
| Kumbuka: 1 Kgf.cm≈0.098 Nm≈14 oz.katika 1 mm≈0.039 | |||||||||
DATA YA GEARBOX
| Hatua ya kupunguza | 2-hatua | 3-hatua | 4-hatua | 5-hatua | 6-hatua | 7-hatua |
| Uwiano wa kupunguza | 6 | 13, 15 | 28, 32, 38 | 61, 71, 83, 96 | 135, 156, 182, 211, 245 | 296, 344, 400, 464, 540, 627 |
| Urefu wa kisanduku cha gia (L) mm | 17.5 | 20 | 22.5 | 25 | 27.5 | 30 |
| Kiwango cha juu cha torque Kgf.cm | 2 | 2 | 2.5 | 4 | 6 | 8 |
| Kiwango cha juu cha torque ya muda Kgf.cm | 3 | 3 | 4 | 6 | 10 | 12 |
| Ufanisi wa gearbox | 81% | 73% | 65% | 59% | 53% | 48% |
DATA YA MOTOR
| Mfano wa magari | Iliyopimwa Volt. | Hakuna mzigo | Mzigo | Kusimama | |||||
| Ya sasa | Kasi | Ya sasa | Kasi | Torque | Nguvu | Torque | Ya sasa | ||
| V | mA | rpm | mA | rpm | gf.cm | W | gf.cm | mA | |
| FT-385 | 6 | ≤400 | 10000 | ≤2500 | 8400 | 80 | 7.04 | ≥430 | ≥8800 |
| FT-385 | 12 | ≤70 | 3000 | ≤260 | 1950 | 50 | 1.02 | ≥160 | ≥520 |
| FT-385 | 12 | ≤90 | 4500 | ≤460 | 3500 | 50 | 1.83 | ≥230 | ≥1300 |
| FT-385 | 24 | ≤80 | 3300 | ≤250 | 2750 | 74 | 2.13 | ≥290 | ≥440 |
| FT-385 | 24 | ≤120 | 7400 | ≤370 | 6400 | 60 | 4.02 | ≥420 | ≥1580 |
Mchanganyiko huu mara nyingi hutumiwa katika programu ambazo zinahitaji torque ya juu na udhibiti sahihi, kama vile robotiki, otomatiki na magari ya umeme. Chaguo la motor isiyo na brashi ya DC inategemea torque maalum na mahitaji ya kasi ya programu. Mambo ya kuzingatia wakati wa kuchagua motor ni pamoja na uwiano wa gia, ukadiriaji wa nguvu, uzito, saizi na voltage ya uendeshaji na mkondo.
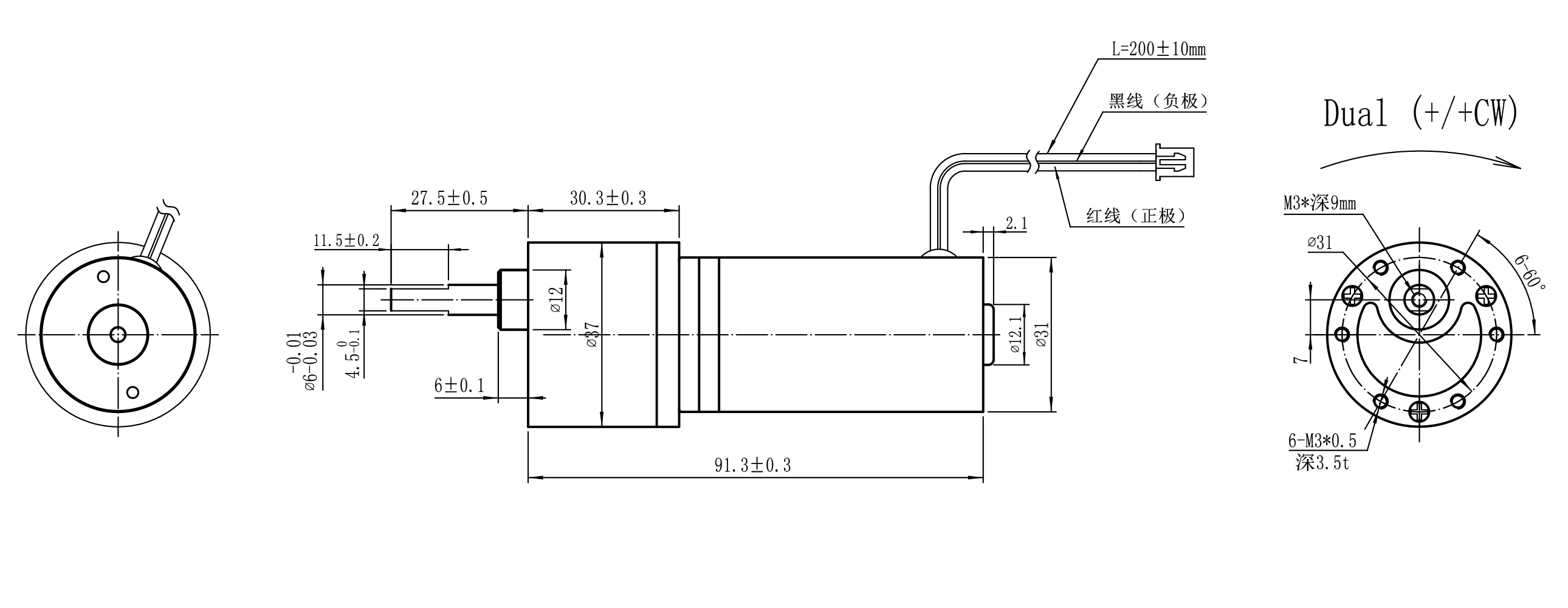
KUCHORA(MM)
Maombi
Gari ya gia ya Round Spur ina sifa ya saizi ndogo, uzani mwepesi na ufanisi wa juu wa upitishaji, na hutumiwa sana katika vifaa anuwai vya mitambo. Hapa kuna baadhi ya matukio ya kawaida ya maombi:
Vichezeo mahiri: Motors ndogo za DC spur gear zinaweza kuendesha vitendo mbalimbali vya vichezeo mahiri, kama vile kugeuza, kubembea, kusukuma, n.k., kuleta utendaji tofauti zaidi na wa kuvutia kwa vinyago.
Roboti: Uboreshaji mdogo na ufanisi wa juu wa injini ndogo za gia za DC spur huzifanya kuwa sehemu muhimu ya uwanja wa roboti. Inaweza kutumika kwa uanzishaji wa pamoja wa roboti, mwendo wa mkono na kutembea, nk.
Wasifu wa Kampuni









-

Injini ya kupunguza gia ya FT-37RGM555 Spur
-

Injini ya gia ya FT-37RGM545 Round Spur yenye gia nyekundu...
-

FT-37RGM3626 PMDC 37mm Spur gear motor 3626 BLD...
-

FT-37RGM545 Kelele ya juu ya torque ya chini 37mm Spur gia...
-

FT-37RGM530 Spur gear motor na udhibiti wa kasi ...
-

FT-37RGM500 Spur gear motors robotic motors