





I mekanisk automationsrörelse är motorn en oumbärlig komponent. I klassificeringen av motorer är de vanligaste och viktigaste motorernaDC-växelmotoreroch stegmotorer. Även om de båda är motorer finns det stora skillnader mellan de två. Följande kommer att introducera skillnaden mellan DC-reduktionsmotorer och stegmotorer i detalj.
DC-reduktionsmotor


1. Arbetsprincip
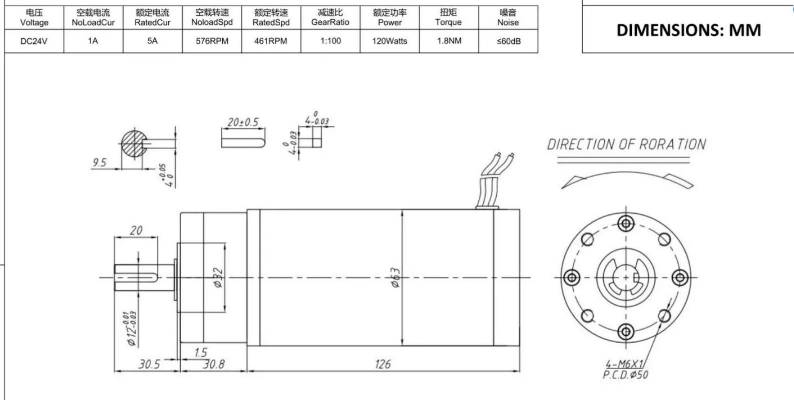
DeDC växelmotorändrar polariteten hos magnetfältet inuti motorn med den positiva och negativa strömmen för den externa strömmen, och realiserar därmed motorns rotation. Den utgående axeln påDC-växelmotorär integrerad med en reducering för att minska utgående rotationshastighet och öka motorns vridmoment för att säkerställa att motorn kan anpassa sig till belastningen.
2. Funktioner
DeDC växelmotor har hög effektivitet, ett brett arbetsområde och lågt penningvärde. Den är särskilt lämplig för applikationsscenarier som kräver högt vridmoment, såsom mekaniska belastningar och automatiska styrsystem, men samtidigt, på grund av dess stora elektromagnetiska förlust, kräver underhåll och felsökning viss professionell kompetens.
Stegmotor
Arbetsprincip 1.
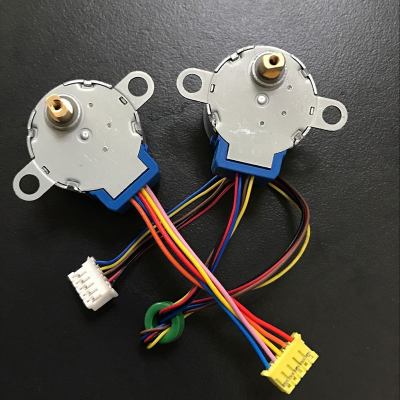
En stegmotor driver motorn att rotera i en viss vinkel genom att kontinuerligt ändra polariteten på dess elektromagnetiska fält när den slås på. Den är uppdelad i två typer: en är en enfas stegmotor och den andra är en trefas stegmotor. Stegmotorns utgående axel kombineras med en omvandlare eller en reducerare för att styra vinkeln och hastigheten.
Drag
Stegmotorer har hög precision, exakt kontroll och kan starta om och starta automatiskt. De är särskilt lämpliga för tillämpningsscenarier med krav på hög precision, såsom digitala skrivare, laserskannrar och LCD-skärmar. Men samtidigt, eftersom stegmotorns drivaxel har mekaniskt buller, är stegmotorer inte det bästa valet när drift med låg ljudnivå krävs.
Skillnaden mellan DC-reduktionsmotor och stegmotor
| Skillnader | DC växelmotor | Stegmotor |
| Arbetsprincip | Ändra polariteten på magnetfältet inuti motorn genom att applicera positiv och negativ ström
| Genom att kontinuerligt ändra polariteten för dess elektromagnetiska fält när den slås på, drivs motorn för att producera en viss rotationsvinkel |
| Utgående axel | Integrerad reducering för att minska utgående rotationshastighet och öka motorns vridmoment | I kombination med en omvandlare eller reducerare kan den styra vinkeln och hastigheten |
| Applikationsscenarier | Lämplig för scenarier som kräver högt vridmoment såsom mekaniska belastningar och automatiska styrsystem | Lämplig för högprecisionskontroll och omstart av självstartande applikationsscenarier, såsom digitala skrivare, laserskannrar, LCD-skärmar |
| Fördelar | Hög effektivitet, brett arbetsområde, lågt monetärt värde | Hög precision, exakt kontroll och kontinuerlig omstart med självstart |
| Nackdelar | Högt elektromagnetiskt slitage, vilket kräver professionell kompetens för underhåll och felsökning | Drivaxeln har mekaniskt ljud |
Slutsats
Kort sagt,DC-växelmotorer och stegmotorer har sina egna fördelar och nackdelar, och deras tillämpningsscenarier är också olika. För vissa scenarier som kräver hög flexibilitetskontroll och hög precision, såsom svetsrobotar och CNC, används vanligtvis stegmotorstyrning, medan scenarier som kräver snabba, effektiva, pålitliga och inte särskilt höga precisionskrav, såsom löpande bandtransportörer, är styrs vanligtvis av DC-reduktionsmotorer.
Posttid: 18-10-2024