





Në lëvizjen e automatizimit mekanik, motori është një komponent i domosdoshëm. Në klasifikimin e motorëve, motorët më të zakonshëm dhe më të rëndësishëm janëMotorët e ingranazheve DCdhe motorët stepper. Edhe pse ata janë të dy motorë, ka dallime të mëdha midis të dyve. Më poshtë do të prezantojë në detaje ndryshimin midis motorëve reduktues DC dhe motorëve stepper.
Motori i reduktimit DC


1. Parimi i punës
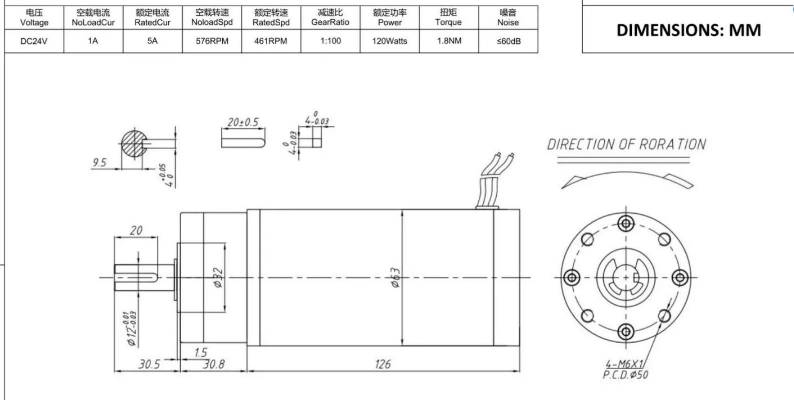
TëMotor ingranazhi DCndryshon polaritetin e fushës magnetike brenda motorit nga rryma pozitive dhe negative e rrymës së jashtme, duke realizuar kështu rrotullimin e motorit. Boshti i daljes sëMotor me ingranazh DCështë i integruar me një reduktues për të zvogëluar shpejtësinë e rrotullimit të daljes dhe për të rritur çift rrotulluesin e motorit për të siguruar që motori të përshtatet me ngarkesën.
2. Veçoritë
TëMotor ingranazhi DC ka efikasitet të lartë, një gamë të gjerë pune dhe vlerë të ulët monetare. Është veçanërisht i përshtatshëm për skenarë aplikimi që kërkojnë çift rrotullues të lartë, si ngarkesat mekanike dhe sistemet e kontrollit automatik, por në të njëjtën kohë, për shkak të humbjes së madhe elektromagnetike, mirëmbajtja dhe zgjidhja e problemeve kërkojnë aftësi të caktuara profesionale.
Motor stepper
Parimi i punës 1.
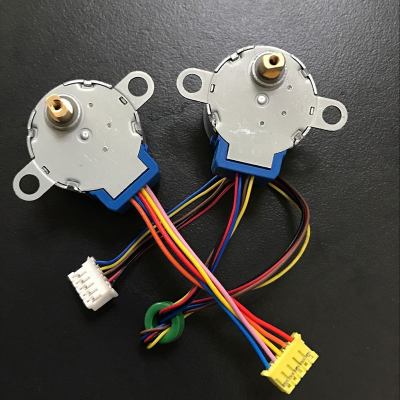
Një motor stepper e shtyn motorin të rrotullohet në një kënd të caktuar duke ndryshuar vazhdimisht polaritetin e fushës së tij elektromagnetike kur ndizet. Ndahet në dy lloje: njëri është një motor stepper njëfazor dhe tjetri është një motor stepper trefazor. Boshti i daljes së motorit stepper kombinohet me një konvertues ose një reduktues për të kontrolluar këndin dhe shpejtësinë.
Veçoritë
Motorët stepper kanë saktësi të lartë, kontroll të saktë dhe mund të rinisin dhe nisin automatikisht. Ato janë veçanërisht të përshtatshme për skenarë aplikimi me kërkesa kontrolli me saktësi të lartë, të tilla si printerët dixhitalë, skanerët lazer dhe ekranet LCD. Megjithatë, në të njëjtën kohë, meqenëse boshti i lëvizjes së motorit stepper ka zhurmë mekanike, motorët stepper nuk janë zgjidhja më e mirë kur kërkohet funksionimi me zhurmë të ulët.
Dallimi midis motorit të reduktimit DC dhe motorit stepper
| Dallimet | Motor ingranazhi DC | Motor stepper |
| Parimi i punës | Ndryshoni polaritetin e fushës magnetike brenda motorit duke aplikuar rrymë pozitive dhe negative
| Duke ndryshuar vazhdimisht polaritetin e fushës së tij elektromagnetike kur ndizet, motori drejtohet për të prodhuar një kënd të caktuar rrotullimi |
| Boshti i daljes | Reduktues i integruar për të zvogëluar shpejtësinë e rrotullimit të daljes dhe për të rritur çift rrotulluesin e motorit | I kombinuar me një konvertues ose reduktues, ai mund të kontrollojë këndin dhe shpejtësinë |
| Skenarët e aplikimit | I përshtatshëm për skenarë që kërkojnë çift rrotullues të lartë si ngarkesat mekanike dhe sistemet e kontrollit automatik | I përshtatshëm për kontroll me precizion të lartë dhe rinisje të skenarëve të aplikacioneve vetë-nisëse, të tilla si printerët dixhitalë, skanerët lazer, ekranet LCD |
| Avantazhet | Efikasitet i lartë, gamë e gjerë pune, vlerë e ulët monetare | Precizion i lartë, kontroll i saktë dhe rinisje e vazhdueshme vetë-nisje |
| Disavantazhet | Veshje e lartë elektromagnetike, që kërkon aftësi profesionale për mirëmbajtjen dhe zgjidhjen e problemeve | Boshti i lëvizjes ka zhurmë mekanike |
konkluzioni
Shkurt,Motorët e ingranazheve DC dhe motorët stepper kanë avantazhet dhe disavantazhet e tyre, dhe skenarët e aplikimit të tyre janë gjithashtu të ndryshëm. Për disa skenarë që kërkojnë kontroll të lartë fleksibiliteti dhe saktësi të lartë, të tilla si robotët e saldimit dhe CNC, zakonisht përdoret kontrolli me motor stepper, ndërsa skenarët që kërkojnë kërkesa të shpejta, efikase, të besueshme dhe saktësi jo shumë të lartë, të tilla si transportuesit e linjës së montimit, janë përgjithësisht kontrollohet nga motorët e reduktimit DC.
Koha e postimit: Tetor-18-2024