





FT-37RGM3530 37mm motor s čelnou prevodovkou Os v strede





Vlastnosti:
Stredový motor s čelným ozubením vo všeobecnosti označuje motor, v ktorom je výstupný hriadeľ zarovnaný s hriadeľom motora, čo znamená, že sú oba umiestnené v strede krytu motora.
Táto konfigurácia umožňuje kompaktnejší dizajn a efektívnejší prenos energie. V tomto nastavení sa rotačná sila motora prenáša priamo na výstupný hriadeľ cez sériu ozubených kolies, konkrétne čelné ozubené kolesá
Video o produkte
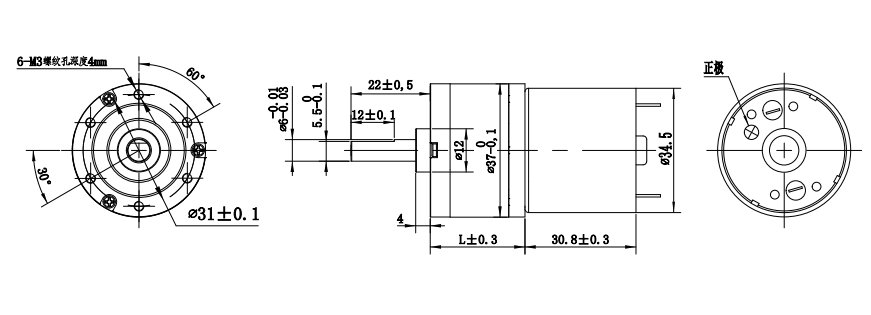
VÝKRES (MM)
Údaje o prevodovke:
| Rad ozubených kolies | 3 | 4 | 5 | 6 | 7 | 8 | ||||||
| Pomer redukcie(K) | 10.6 | 24.4 | 42.7 | 74,7 | 130,8 | 228 | ||||||
| Dĺžka prevodovky L (mm) | 23 | 26.3 | 28.8 | 31.7 | 34.5 | 37.3 | ||||||
| Menovitý krútiaci moment(kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Okamžitý krútiaci moment(kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Účinnosť prevodovky(%) | 73 % | 65 % | 58 % | 52 % | 47 % | 42 % | ||||||
Údaje o motore:
| Model motora | Žiadne zaťaženie | Načítať | Stall | |||||||||
| Menovité napätie | Rýchlosť | Aktuálne | Rýchlosť | Aktuálne | Výstup | Krútiaci moment | Aktuálne | Krútiaci moment | ||||
| V | (ot./min) | (mA) | (ot./min) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-3530 | 12 | 3000 | 60 | 2550 | 170 | 2.04 | 20 | 460 | 200 | |||
| FT-3530 | 12 | 6000 | 70 | 4500 | 350 | 4.2 | 110 | 2300 | 440 | |||
| FT-3530 | 24 | 4500 | 40 | 3300 | 150 | 3.6 | 50 | 700 | 270 | |||
| FT-3530 | 24 | 6000 | 40 | 4500 | 200 | 4.8 | 100 | 1400 | 400 | |||
Aplikácia
Okrúhly prevodový motor má vlastnosti malej veľkosti, nízkej hmotnosti a vysokej účinnosti prenosu a je široko používaný v rôznych mikromechanických zariadeniach. Tu sú niektoré bežné scenáre aplikácie:
Inteligentné hračky: Miniatúrne jednosmerné motory s čelným ozubením môžu poháňať rôzne činnosti inteligentných hračiek, ako je otáčanie, hojdanie, tlačenie atď., čím prinášajú hračkám rozmanitejšie a zaujímavejšie funkcie.
Roboty: Miniaturizácia a vysoká účinnosť miniatúrnych jednosmerných motorov s čelným ozubením z nich robí dôležitú súčasť v oblasti robotiky. Môže sa použiť na ovládanie kĺbov robota, pohyb rúk a chôdzu atď.
Profil spoločnosti




-

FT-37RGM3540 37mm motor s čelnou prevodovkou 350 motor s...
-

FT-37RGM3626 PMDC 37mm motor s čelnou prevodovkou 3626 BLD...
-

FT-37RGM520 12V 24V jednosmerný prevodový motor 37mm prevodový m...
-

Robotický motor FT-37RGM500 Motor s čelnou prevodovkou
-

Jednosmerné prevodové motory FT-37RGM3530-641K pre samočistenie...
-

FT-37RGM530 37mm motor s čelnou prevodovkou