





FT-37RGM545 Motor cu angrenaj cilindru rotund cu reductor de viteze







Caracteristici:
La Forto, ne angajăm să oferim soluții de înaltă calitate care depășesc așteptările clienților noștri. Cutiile noastre de viteze circulare de 37 mm combină tehnologia de ultimă oră, fiabilitatea și versatilitatea pentru a oferi soluția ideală pentru aplicațiile dvs. de acționare a motorului.
Date cutie de viteze:
| Seria de viteze | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Raport de reducere (K) | 6.8, 10 | 20、30、 40, 46 | 61, 90 100.103 | 115、138、160、163、184、270、300 | 310、414、552、614 641、810、900 | 932, 1243, 1657 2430, 2700 | ||||||
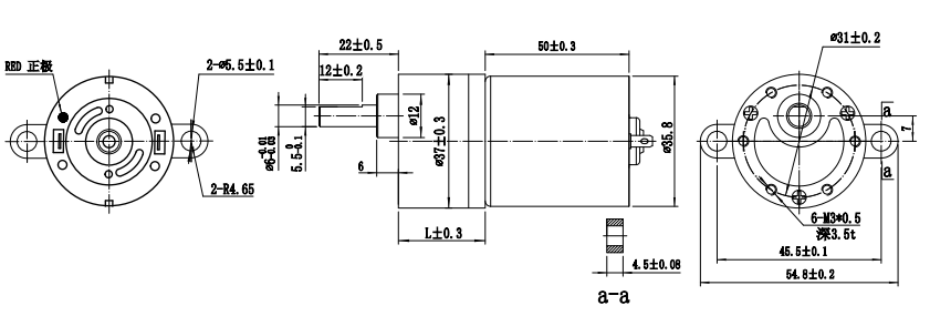
| Lungime cutie de viteze L (mm) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| Cuplul nominal (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Cuplu instantaneu (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Eficiența cutiei de viteze(%) | 81% | 73% | 65% | 59% | 53% | 48% | ||||||
Date cutie de viteze:
| Model de motor | Tensiune nominală | Fără încărcare | Încărca | Stand | ||||||||
| Viteză | Actual | Viteză | Actual | Ieșire | Cuplu | Actual | Cuplu | |||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Aplicație
Motorul cu angrenaje rotunde are caracteristicile dimensiunilor mici, greutății ușoare și eficienței de transmisie ridicate și este utilizat pe scară largă în diferite echipamente micromecanice. Iată câteva scenarii de aplicații comune:
Jucării inteligente: Motoarele miniaturale cu angrenaje cilindrice DC pot conduce diverse acțiuni ale jucăriilor inteligente, cum ar fi întoarcerea, balansarea, împingerea etc., aducând funcții mai diverse și mai interesante jucăriilor.
Roboți: miniaturizarea și eficiența ridicată a motoarelor DC miniaturale cu angrenaje cilindrice le fac o parte importantă a domeniului roboticii. Poate fi folosit pentru acționarea articulației robotului, mișcarea mâinii și mers etc.
Profilul Companiei




-

FT-37RGM3530 Motor cu angrenaj cilindru de 37 mm Axa în centru
-

FT-37RGM3530 Cutie de viteze 37mm Motor cu angrenaj cilindru DC
-

FT-37RGM545 Cuplu mare, zgomot redus, 37 mm, angrenaj cilindric...
-

FT-37RGM3530 Motor cu angrenaj cilindru de 37 mm
-

FT-37RGM31ZY 37mm motor cu angrenaj cilindru rotund 31ZY tu...
-

FT-37RGM3540 37mm Motor cu angrenaj cilindru 350 motor cu...