





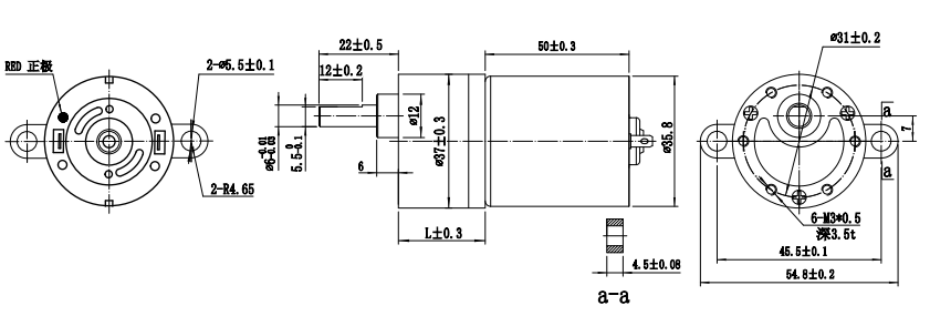
Motor de engrenagem de dentes retos redondos FT-37RGM545 com redução de engrenagem







Características:
Na Forto, temos o compromisso de fornecer soluções de alta qualidade que superem as expectativas de nossos clientes. Nossas caixas de engrenagens circulares de 37 mm combinam tecnologia de ponta, confiabilidade e versatilidade para fornecer a solução ideal para suas aplicações de acionamento de motor.
Dados da caixa de velocidades:
| Série de engrenagens | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Taxa de redução (K) | 6,8、10 | 20,30, 40,46 | 61、90 100.103 | 115,138,160,163,184,270,300 | 310、414、552、614 641、810、900 | 932、1243、1657 2430、2700 | ||||||
| Comprimento da caixa de engrenagensL(mm) | 16.2 | 19,7 | 22.2 | 24,7 | 27.2 | 29,7 | ||||||
| Torque nominal(kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Torque instantâneo(kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Eficiência da caixa de engrenagens(%) | 81% | 73% | 65% | 59% | 53% | 48% | ||||||
Dados da caixa de velocidades:
| Modelo de motor | Tensão nominal | Sem carga | Carregar | Parar | ||||||||
| Velocidade | Atual | Velocidade | Atual | Saída | Torque | Atual | Torque | |||||
| V | (rpm) | (mA) | (rpm) | (mA) | (c) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8.000 | 550 | 6700 | 3700 | 44,4 | 295 | 11.000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6.000 | 120 | 4800 | 770 | 18,5 | 170 | 3300 | 770 | |||
Aplicativo
O motor de engrenagem de dentes retos redondos tem características de tamanho pequeno, peso leve e alta eficiência de transmissão, e é amplamente utilizado em vários equipamentos micromecânicos. Aqui estão alguns cenários de aplicação comuns:
Brinquedos inteligentes: os motores de engrenagem DC em miniatura podem acionar várias ações de brinquedos inteligentes, como girar, balançar, empurrar, etc., trazendo funções mais diversas e interessantes aos brinquedos.
Robôs: A miniaturização e a alta eficiência dos motores de engrenagem reta DC em miniatura os tornam uma parte importante do campo da robótica. Ele pode ser usado para atuação de articulação de robô, movimento de mão e caminhada, etc.
perfil de companhia




-

FT-37RGM3530 Eixo do motor de engrenagem de dentes retos de 37 mm no centro
-

FT-37RGM3530 motor de engrenagem de dentes retos DC com caixa de engrenagens de 37 mm
-

FT-37RGM545 Engrenagem de dentes retos de 37 mm de alto torque e baixo ruído ...
-

Motor de engrenagem de dentes retos FT-37RGM3530 37 mm
-

FT-37RGM31ZY Motorredutor de dentes redondos de 37 mm 31ZY tu...
-

FT-37RGM3540 Motor de engrenagem de dentes retos de 37 mm 350 com ...