





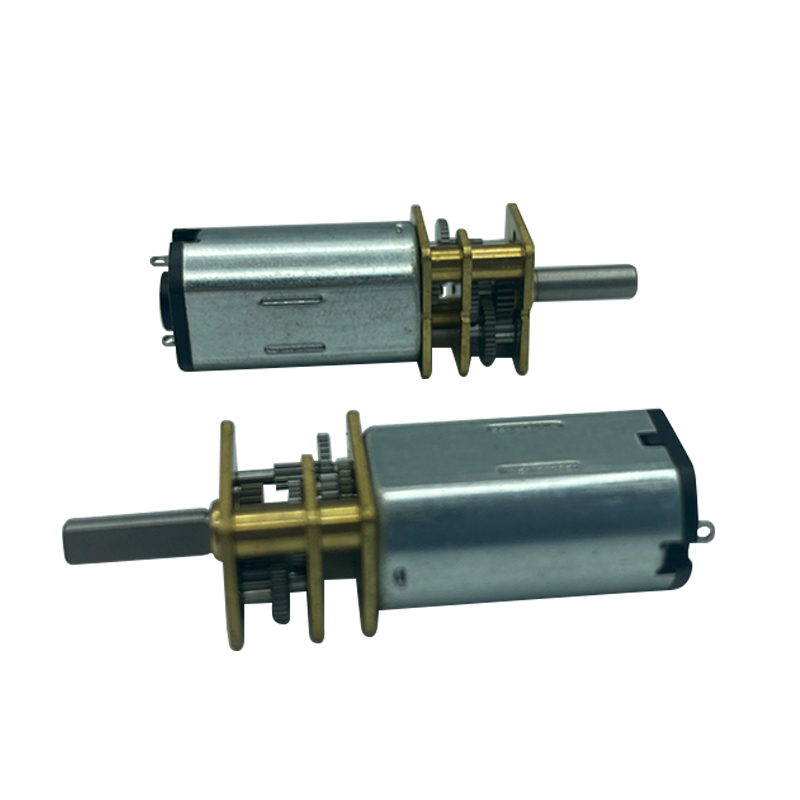
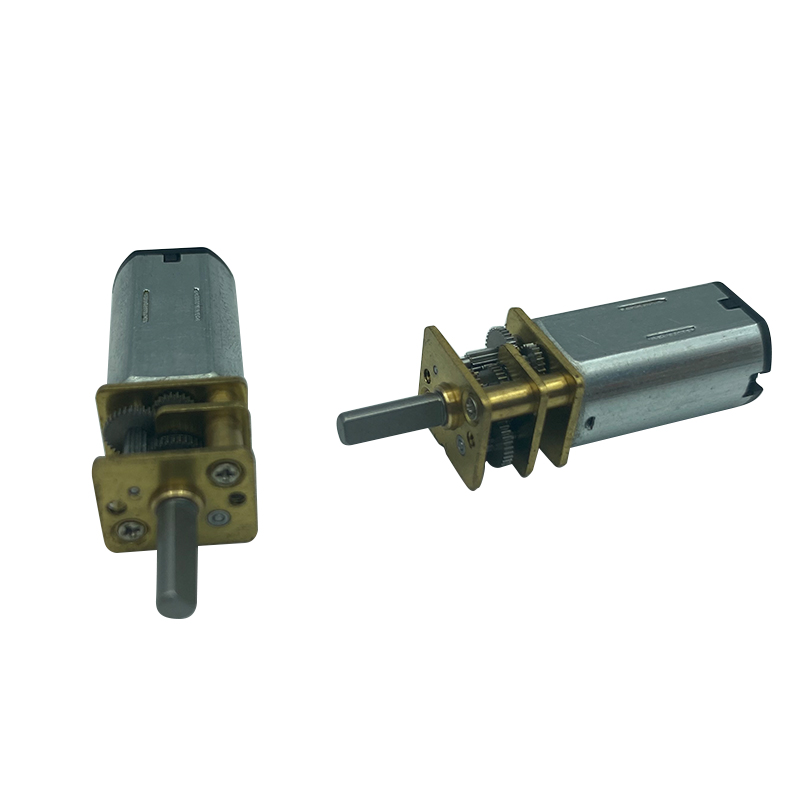
Motoreduktor płaski FT-12FGMN30




Cechy:
płaskie motoreduktory prądu stałego mają zalety kompaktowej konstrukcji, wysokiego momentu obrotowego, wysokiej wydajności, precyzyjnego sterowania ruchem i trwałości. Dzięki temu idealnie nadają się do zastosowań wymagających wysokiego momentu obrotowego i precyzyjnego sterowania.
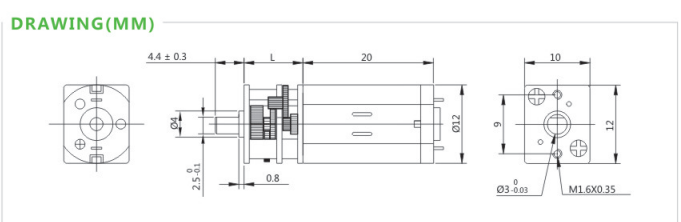
Wymiar (jednostka miary to mm)

| SPECYFIKACJE | |||||||||
| Specyfikacje służą wyłącznie celom informacyjnym. Skontaktuj się z nami, aby uzyskać spersonalizowane dane. | |||||||||
| Numer modelu | Napięcie znamionowe | Brak obciążenia | Obciążenie | Stoisko | |||||
| Prędkość | Aktualny | Prędkość | Aktualny | Moment obrotowy | Moc | Aktualny | Moment obrotowy | ||
| obr./min | mA (maks.) | obr./min | mA (maks.) | gf.cm | W | mA (min) | gf.cm | ||
| FT-12FGMN2000310000-10K | 3V | 1000 | 40 | 770 | 150 | 26 | 0,21 | 400 | 110 |
| FT-12FGMN2000315000-30K | 3V | 500 | 200 | 312 | 450 | 80 | 0,26 | 690 | 225 |
| FT-12FGMN2000315000-100K | 3V | 150 | 50 | 125 | 220 | 180 | 0,23 | 900 | 1050 |
| FT-12FGMN2000316000-150K | 3V | 106 | 90 | 78 | 280 | 220 | 0,18 | 620 | 825 |
| FT-12FGMN2000315000-298K | 3V | 50 | 80 | 40 | 260 | 505 | 0,21 | 700 | 2060 |
| FT-12FGMN2000320000-1000K | 3V | 20 | 160 | 15 | 460 | 2000 | 0,31 | 780 | 5.5 |
| FT-12FGMN204.515000-50K | 4,5 V | 300 | 40 | 250 | 150 | 60 | 0,15 | 440 | 250 |
| FT-12FGMN204.515000-150K | 4,5 V | 100 | 40 | 80 | 150 | 200 | 0,16 | 420 | 840 |
| FT-12FGMN204.59000-210K | 4,5 V | 43 | 35 | 34 | 85 | 215 | 0,08 | 180 | 830 |
| FT-12FGMN2000517000-50K | 5V | 340 | 50 | 285 | 165 | 116 | 0,34 | 550 | 548 |
| FT-12FGMN2000515000-100K | 5V | 150 | 70 | 115 | 170 | 161 | 0,19 | 370 | 590 |
| FT-12FGMN2000510000-250K | 5V | 40 | 35 | 33 | 85 | 360 | 0,12 | 210 | 1410 |
| FT-12FGMN2000615500-50K | 6V | 310 | 60 | 230 | 180 | 110 | 0,26 | 400 | 380 |
| FT-12FGMN2000615500-100K | 6V | 155 | 30 | 140 | 100 | 150 | 0,22 | 400 | 920 |
| FT-12FGMN2000610000-250K | 6V | 40 | 45 | 30 | 100 | 370 | 0,11 | 150 | 1100 |
| FT-12FGMN2000620000-298K | 6V | 67 | 80 | 55 | 230 | 585 | 0,33 | 630 | 2480 |
| FT-12FGMN2000610400-1000K | 6V | 10 | 50 | 7 | 110 | 1400 | 0,1 | 130 | 3900 |
| FT-12FGMN2001220000-50K | 12 V | 400 | 35 | 310 | 120 | 110 | 0,35 | 300 | 480 |
| FT-12FGMN2001225500-100K | 12 V | 255 | 40 | 205 | 150 | 300 | 0,63 | 650 | 1500 |
| FT-12FGMN2001220000-150K | 12 V | 133 | 50 | 108 | 160 | 330 | 0,37 | 300 | 1300 |
| FT-12FGMN2001220000-250K | 12 V | 80 | 45 | 69 | 110 | 450 | 0,32 | 280 | 2080 |
| FT-12FGMN2001220000-298K | 12 V | 67 | 40 | 55 | 120 | 670 | 0,38 | 300 | 3000 |
| Uwaga: 1 gf.cm≈0,098 mN.m≈0,014 uncji cala 1 mm≈0,039 cala | |||||||||
Wideo
Aplikacja
Robot: Motoreduktor kwadratowy może być zastosowany w przegubie lub układzie napędowym robota, aby zapewnić stabilną siłę obrotową oraz kontrolować zakres ruchu i prędkość robota.
Sprzęt automatyki: motoreduktory kwadratowe są szeroko stosowane w różnych urządzeniach automatyki, takich jak drzwi automatyczne, automaty sprzedające, automatyczne windy itp., poprzez obrót motoreduktorów kwadratowych w celu realizacji otwierania, zamykania lub regulacji położenia sprzętu.
Sprzęt medyczny: motoreduktory kwadratowe mogą być stosowane w sprzęcie medycznym, takim jak roboty chirurgiczne, sprzęt medyczny itp., Aby osiągnąć dokładność i stabilność operacji medycznych poprzez kontrolowanie ruchu motoreduktorów kwadratowych.
Krótko mówiąc, zastosowanie motoreduktorów kwadratowych jest bardzo szerokie i obejmuje prawie wszystkie dziedziny automatyki i urządzeń mechanicznych.
Specyfikacje te określają prędkość wyjściową silnika, moment obrotowy i pobór mocy. Niektóre modele mogą również oferować funkcje, takie jak enkodery lub hamulce, zapewniające lepszą kontrolę i bezpieczeństwo. Silniki te znajdują zastosowanie w robotyce, sprzęcie automatyki, urządzeniach medycznych, systemach motoryzacyjnych i nie tylko. Często wybiera się je ze względu na ich niewielkie rozmiary, trwałość i możliwość zapewnienia precyzyjnego i niezawodnego sterowania ruchem w środowiskach o ograniczonej przestrzeni. Ogólnie rzecz biorąc, płaskie motoreduktory prądu stałego są wszechstronnym i wydajnym rozwiązaniem do zastosowań wymagających wysokiego momentu obrotowego i precyzyjnej kontroli prędkości i ruch.
| Model silnika | Znamionowe napięcie | Brak obciążenia | Obciążenie | Stoisko | |||||||||
| Prędkość | CuTen | Prędkość | Aktualny | Wyjście | Moment obrotowy | Aktualny | Targ | ||||||
| V | (obr/min | (mama | (obr/min) | (mama) | w | (gcm | (mama) | gcm) | |||||
| FT-N30 | 2.5 | 5300 | 15 | 4220 | 59 | 0,15 | 1.6 | 230 | 8 | ||||
| FT-N30 | 4,5 | 26000 | 130 | 23000 | 600 | 2.5 | 5 | 2200 | 37 | ||||
| FT-N30 | 3.3 | 23000 | 120 | 19000 | 700 | 2.31 | 5 | 2200 | 24 | ||||
| FT-N30 | 12 | 15500 | 30 | 12400 | 75 | 0,62 | 4.2 | 350 | 18 | ||||
Profil firmy




-

FT-24FGMN20 Minimotoreduktor prądu stałego Silniki mikroprądu 12 V
-

FT-12FGMN20 12mm mini płaskie motoreduktory prądu stałego 100% ...
-

FT-12FGMN20 mały płaski motoreduktor 12mm skrzynia biegów...
-

Miniaturowy silnik prądu stałego FT-12FGMN20 12 mm mini przekładnia...
-

Silnik z przekładnią płaską FT-12FGMN20 12 mm z długim wyprzedzeniem...