





I mekanisk automasjonsbevegelse er motoren en uunnværlig komponent. I klassifiseringen av motorer er de vanligste og viktigste motoreneDC girmotorerog trinnmotorer. Selv om de begge er motorer, er det store forskjeller mellom de to. Det følgende vil introdusere forskjellen mellom DC-reduksjonsmotorer og trinnmotorer i detalj.
DC reduksjonsmotor


1. Arbeidsprinsipp
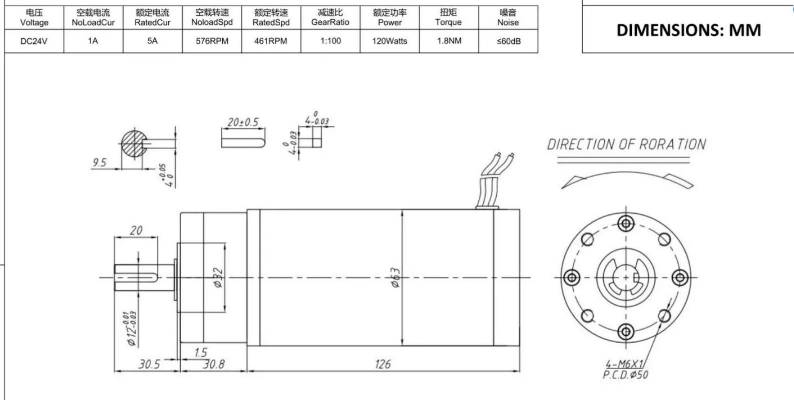
DeDC girmotorendrer polariteten til magnetfeltet inne i motoren med den positive og negative strømmen til den eksterne strømmen, og realiserer dermed motorens rotasjon. Utgangsakselen tilDC girmotorer integrert med en reduksjon for å redusere utgangsrotasjonshastigheten og øke dreiemomentet til motoren for å sikre at motoren kan tilpasse seg belastningen.
2. Funksjoner
DeDC girmotor har høy effektivitet, et bredt arbeidsområde og lav pengeverdi. Den er spesielt egnet for bruksscenarier som krever høyt dreiemoment, som mekaniske belastninger og automatiske kontrollsystemer, men samtidig krever vedlikehold og feilsøking på grunn av det store elektromagnetiske tapet visse faglige ferdigheter.
Trinnmotor
Arbeidsprinsipp 1.
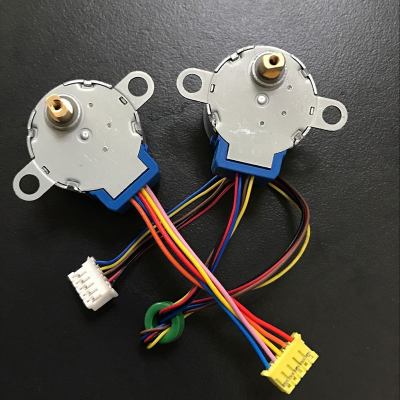
En trinnmotor driver motoren til å rotere i en viss vinkel ved kontinuerlig å endre polariteten til dets elektromagnetiske felt når den slås på. Den er delt inn i to typer: den ene er en enfaset trinnmotor og den andre er en trefaset trinnmotor. Utgangsakselen til trinnmotoren er kombinert med en omformer eller en redusering for å kontrollere vinkelen og hastigheten.
Funksjoner
Trinnmotorer har høy presisjon, presis kontroll, og kan starte på nytt og starte automatisk. De er spesielt egnet for bruksscenarier med høypresisjonskontrollkrav, for eksempel digitale skrivere, laserskannere og LCD-skjermer. Men samtidig, siden trinnmotorens drivaksel har mekanisk støy, er ikke trinnmotorer det beste valget når støysvak drift er nødvendig.
Forskjellen mellom DC-reduksjonsmotor og trinnmotor
| Forskjeller | DC girmotor | Trinnmotor |
| Arbeidsprinsipp | Endre polariteten til magnetfeltet inne i motoren ved å bruke positiv og negativ strøm
| Ved kontinuerlig å endre polariteten til det elektromagnetiske feltet når den slås på, drives motoren til å produsere en viss rotasjonsvinkel |
| Utgående aksel | Integrert redusering for å redusere utgangsrotasjonshastigheten og øke dreiemomentet til motoren | Kombinert med en omformer eller redusering kan den kontrollere vinkelen og hastigheten |
| Applikasjonsscenarier | Egnet for scenarier som krever høyt dreiemoment som mekaniske belastninger og automatiske kontrollsystemer | Egnet for høypresisjonskontroll og omstart selvstartende applikasjonsscenarier, for eksempel digitale skrivere, laserskannere, LCD-skjermer |
| Fordeler | Høy effektivitet, bredt arbeidsområde, lav pengeverdi | Høy presisjon, presis kontroll og kontinuerlig omstart selvstart |
| Ulemper | Høy elektromagnetisk slitasje, som krever profesjonelle ferdigheter for vedlikehold og feilsøking | Drivakselen har mekanisk støy |
Konklusjon
Kort sagt,DC girmotorer og trinnmotorer har sine egne fordeler og ulemper, og deres bruksscenarier er også forskjellige. For noen scenarier som krever høy fleksibilitetskontroll og høy presisjon, for eksempel sveiseroboter og CNC, brukes trinnmotorstyring generelt, mens scenarier som krever raske, effektive, pålitelige og ikke særlig høye presisjonskrav, som for eksempel samlebåndstransportører, er generelt kontrollert av DC-reduksjonsmotorer.
Innleggstid: 18. oktober 2024