





Bij mechanische automatiseringsbewegingen is de motor een onmisbaar onderdeel. In de classificatie van motoren zijn de meest voorkomende en belangrijkste motorenDC-reductiemotorenen stappenmotoren. Hoewel het beide motoren zijn, zijn er grote verschillen tussen de twee. Hieronder wordt het verschil tussen DC-reductiemotoren en stappenmotoren in detail geïntroduceerd.
DC-reductiemotor


1. Werkingsprincipe
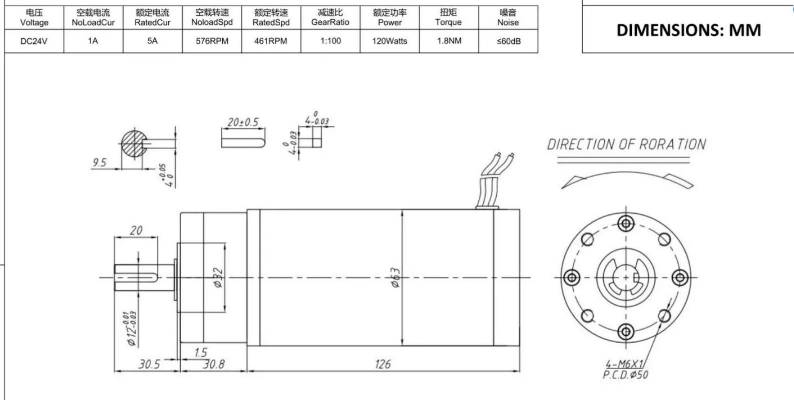
DeDC-reductiemotorverandert de polariteit van het magnetische veld in de motor door de positieve en negatieve stroom van de externe stroom, waardoor de rotatie van de motor wordt gerealiseerd. De uitgaande as van deDC-motorreductoris geïntegreerd met een reductiemiddel om de uitgangsrotatiesnelheid te verlagen en het koppel van de motor te verhogen om ervoor te zorgen dat de motor zich aan de belasting kan aanpassen.
2. Kenmerken
DeDC-reductiemotor heeft een hoog rendement, een breed werkbereik en een lage geldwaarde. Het is met name geschikt voor toepassingsscenario's die een hoog koppel vereisen, zoals mechanische belastingen en automatische besturingssystemen, maar tegelijkertijd, vanwege het grote elektromagnetische verlies, vereisen onderhoud en probleemoplossing bepaalde professionele vaardigheden.
Stappenmotor
Werkingsprincipe 1.
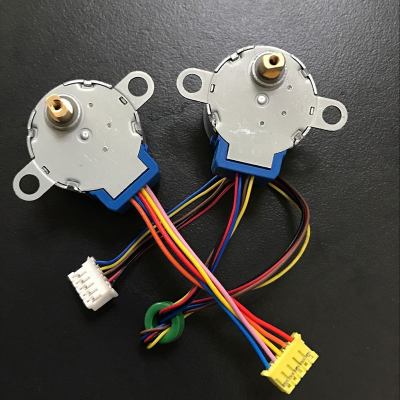
Een stappenmotor zorgt ervoor dat de motor onder een bepaalde hoek draait door de polariteit van het elektromagnetische veld voortdurend te veranderen wanneer deze wordt ingeschakeld. Het is verdeeld in twee typen: de ene is een eenfasige stappenmotor en de andere is een driefasige stappenmotor. De uitgaande as van de stappenmotor wordt gecombineerd met een omvormer of een verloopstuk om de hoek en snelheid te regelen.
Functies
Stappenmotoren hebben een hoge precisie, nauwkeurige bediening en kunnen automatisch opnieuw opstarten en starten. Ze zijn bijzonder geschikt voor toepassingsscenario's met hoge precisie-besturingseisen, zoals digitale printers, laserscanners en LCD-schermen. Omdat de aandrijfas van de stappenmotor mechanisch geluid maakt, zijn stappenmotoren echter niet de beste keuze als een geluidsarme werking vereist is.
Het verschil tussen DC-reductiemotor en stappenmotor
| Verschillen | DC-reductiemotor | Stappenmotor |
| Werkingsprincipe | Verander de polariteit van het magnetische veld in de motor door positieve en negatieve stroom aan te leggen
| Door de polariteit van het elektromagnetische veld voortdurend te veranderen wanneer deze wordt ingeschakeld, wordt de motor aangedreven om een bepaalde rotatiehoek te produceren |
| Uitgaande as | Geïntegreerd verloopstuk om de uitgangsrotatiesnelheid te verminderen en het koppel van de motor te verhogen | Gecombineerd met een converter of verloopstuk kan het de hoek en snelheid regelen |
| Toepassingsscenario's | Geschikt voor scenario's die een hoog koppel vereisen, zoals mechanische belastingen en automatische besturingssystemen | Geschikt voor zeer nauwkeurige besturing en herstart van zelfstartende toepassingsscenario's, zoals digitale printers, laserscanners, LCD-schermen |
| Voordelen | Hoog rendement, breed werkbereik, lage geldwaarde | Hoge precisie, nauwkeurige controle en continue herstart, zelfstartend |
| Nadelen | Hoge elektromagnetische slijtage, waardoor professionele vaardigheden vereist zijn voor onderhoud en probleemoplossing | De aandrijfas maakt mechanisch geluid |
Conclusie
Kortom,DC-reductiemotoren en stappenmotoren hebben hun eigen voor- en nadelen, en hun toepassingsscenario's zijn ook verschillend. Voor sommige scenario's die een hoge flexibiliteitscontrole en hoge precisie vereisen, zoals lasrobots en CNC, wordt over het algemeen stappenmotorbesturing gebruikt, terwijl scenario's die snelle, efficiënte, betrouwbare en niet erg hoge precisie-eisen vereisen, zoals lopende bandtransporteurs, worden toegepast. doorgaans bestuurd door DC-reductiemotoren.
Posttijd: 18 oktober 2024