





FT-37RGM545 ဂီယာလျှော့ချထားသော Round Spur ဂီယာမော်တာ







အင်္ဂါရပ်များ:
Forto တွင်၊ ကျွန်ုပ်တို့သည် ကျွန်ုပ်တို့၏ဖောက်သည်များ၏မျှော်လင့်ချက်ထက် ကျော်လွန်သည့် အရည်အသွေးမြင့်ဖြေရှင်းချက်များကို ပေးဆောင်ရန် ကတိပြုပါသည်။ ကျွန်ုပ်တို့၏ 37 မီလီမီတာ စက်ဝိုင်းရှိ ဆူးဂီယာအုံများသည် သင့်မော်တာမောင်းနှင်မှုအပလီကေးရှင်းများအတွက် စံပြဖြေရှင်းချက်ကို ပေးစွမ်းရန် နောက်ဆုံးပေါ်နည်းပညာ၊ ယုံကြည်စိတ်ချရမှုနှင့် ဘက်စုံအသုံးပြုနိုင်မှုတို့ကို ပေါင်းစပ်ထားသည်။
ဂီယာဘောက်စ်ဒေတာ-
| ဂီယာစီးရီး | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| လျှော့ချရေးအချိုး (K) | ၆.၈၊ ၁၀ | ၂၀၊၃၀၊ ၄၀၊၄၆ | ၆၁၊၉၀ 100.103 | ၁၁၅၊ ၁၃၈၊ ၁၆၀၊ ၁၆၃၊ ၁၈၄၊ ၂၇၀၊ ၃၀၀ | ၃၁၀၊ ၄၁၄၊ ၅၅၂၊ ၆၁၄ ၆၄၁၊ ၈၁၀၊ ၉၀၀ | ၉၃၂၊ ၁၂၄၃၊ ၁၆၅၇ ၂၄၃၀၊ ၂၇၀၀ | ||||||
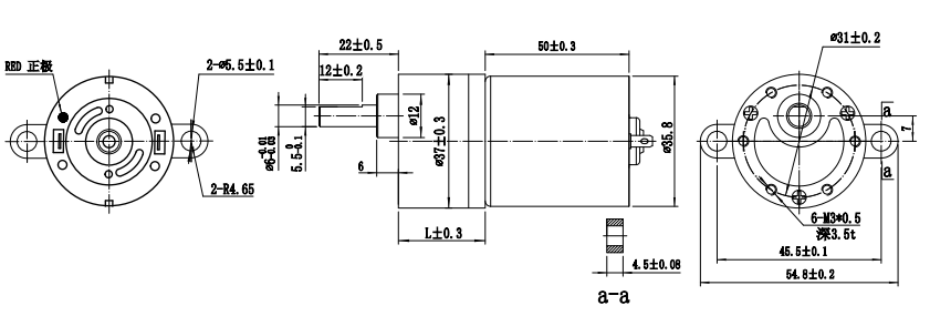
| ဂီယာဘောက်စ် အရှည်L(mm) | ၁၆.၂ | ၁၉.၇ | ၂၂.၂ | ၂၄.၇ | ၂၇.၂ | ၂၉.၇ | ||||||
| အဆင့်သတ်မှတ်ထားသော ရုန်းအား (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| လက်ငင်း ရုန်းအား (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| ဂီယာဘောက်စ် ထိရောက်မှု (%) | ၈၁% | 73% | 65% | 59% | ၅၃% | ၄၈% | ||||||
ဂီယာဘောက်စ်ဒေတာ-
| မော်တော်မော်ဒယ် | အဆင့်သတ်မှတ်ထားသော ဗို့အား | Load မရှိပါ။ | ဝန် | ကုပ် | ||||||||
| အရှိန် | လက်ရှိ | အရှိန် | လက်ရှိ | အထွက် | Torque | လက်ရှိ | Torque | |||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | ၄၅၀၀ | ၂၅၀ | ၃၈၀၀ | ၈၁၀ | ၉.၇ | ၁၆၀ | ၃၇၀၀ | ၉၁၀ | |||
| FT-545 | 12 | ၈၀၀၀ | ၅၅၀ | ၆၇၀၀ | ၃၇၀၀ | ၄၄.၄ | ၂၉၅ | ၁၁၀၀၀ | ၁၅၀၀ | |||
| FT-545 | 24 | ၄၅၀၀ | ၁၀၀ | ၃၁၀၀ | ၄၅၀ | ၁၀.၈ | ၂၃၀ | ၁၄၀၀ | ၇၃၀ | |||
| FT-545 | 24 | ၆၀၀၀ | ၁၂၀ | ၄၈၀၀ | ၇၇၀ | ၁၈.၅ | ၁၇၀ | ၃၃၀၀ | ၇၇၀ | |||
လျှောက်လွှာ
Round Spur ဂီယာမော်တာတွင် သေးငယ်သောအရွယ်အစား၊ ပေါ့ပါးပြီး ဂီယာထိရောက်မှုမြင့်မားသော ဝိသေသလက္ခဏာများရှိပြီး အမျိုးမျိုးသော အသေးစားစက်မှုကိရိယာများတွင် တွင်ကျယ်စွာအသုံးပြုပါသည်။ ဤသည်မှာ အသုံးများသော အပလီကေးရှင်းအခြေအနေအချို့ဖြစ်သည်။
စမတ်ကစားစရာများ- သေးငယ်သော DC spur ဂီယာမော်တာများသည် လှည့်ခြင်း၊ လွှဲခြင်း၊ တွန်းခြင်းစသည့် စမတ်အရုပ်များ၏ လုပ်ဆောင်ချက်အမျိုးမျိုးကို မောင်းနှင်နိုင်ပြီး အရုပ်များဆီသို့ ပိုမိုကွဲပြားပြီး စိတ်ဝင်စားစရာကောင်းသည့် လုပ်ဆောင်ချက်များကို ယူဆောင်လာပေးပါသည်။
စက်ရုပ်များ- အသေးစား DC spur ဂီယာမော်တာများ၏ သေးငယ်ပြီး ထိရောက်မှု မြင့်မားမှုသည် ၎င်းတို့အား စက်ရုပ်နယ်ပယ်၏ အရေးကြီးသော အစိတ်အပိုင်းတစ်ခု ဖြစ်လာစေသည်။ စက်ရုပ်ပူးတွဲလှုပ်ရှားမှု၊ လက်လှုပ်ရှားမှုနှင့် လမ်းလျှောက်ခြင်းစသည်တို့အတွက် အသုံးပြုနိုင်သည်။
ကုမ္ပဏီအကြောင်း









