





FT-37RGM3530 37mm Spur ဂီယာမော်တာ ဝင်ရိုးအလယ်





အင်္ဂါရပ်များ:
ဗဟိုပြု spur ဂီယာမော်တာသည် ယေဘူယျအားဖြင့် အထွက်ဝင်ရိုးကို မော်တာရိုးတံနှင့် လိုက်လျောညီထွေဖြစ်စေသော မော်တာအား ရည်ညွှန်းသည်၊ ဆိုလိုသည်မှာ ၎င်းတို့နှစ်ဦးစလုံးသည် မော်တာအိမ်ရာ၏အလယ်ဗဟိုတွင် တည်ရှိနေပါသည်။
ဤဖွဲ့စည်းပုံသည် ပိုမိုကျစ်လစ်သိပ်သည်းသော ဒီဇိုင်းနှင့် ပိုမိုထိရောက်သော ပါဝါလွှဲပြောင်းမှုကို ရရှိစေပါသည်။ ဤတပ်ဆင်မှုတွင်၊ မော်တာ၏လည်ပတ်အားအား ဂီယာအစီအရီမှတဆင့် အထွက်ပေါက်ရိုးသို့ တိုက်ရိုက်ပို့လွှတ်သည်၊ အထူးသဖြင့် ဆူးဂီယာများ၊
ထုတ်ကုန်ဗီဒီယို
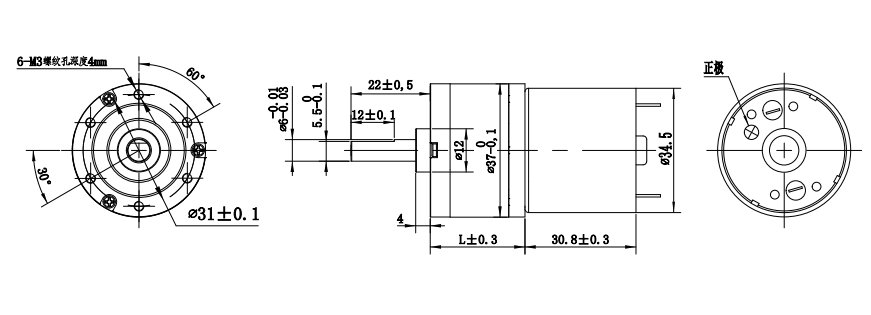
ပုံဆွဲခြင်း(MM)
ဂီယာဘောက်စ်ဒေတာ-
| ဂီယာစီးရီး | 3 | 4 | 5 | 6 | 7 | 8 | ||||||
| လျှော့ချရေးအချိုး (K) | ၁၀.၆ | ၂၄.၄ | ၄၂.၇ | ၇၄.၇ | ၁၃၀.၈ | ၂၂၈ | ||||||
| ဂီယာဘောက်စ် အရှည်L(mm) | 23 | ၂၆.၃ | ၂၈.၈ | ၃၁.၇ | ၃၄.၅ | ၃၇.၃ | ||||||
| အဆင့်သတ်မှတ်ထားသော ရုန်းအား (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| လက်ငင်း ရုန်းအား (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| ဂီယာဘောက်စ် ထိရောက်မှု (%) | 73% | 65% | ၅၈% | ၅၂% | 47% | 42% | ||||||
မော်တာဒေတာ-
| မော်တော်မော်ဒယ် | Load မရှိပါ။ | ဝန် | ကုပ် | |||||||||
| အဆင့်သတ်မှတ်ထားသော ဗို့အား | အရှိန် | လက်ရှိ | အရှိန် | လက်ရှိ | အထွက် | Torque | လက်ရှိ | Torque | ||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-3530 | 12 | ၃၀၀၀ | 60 | ၂၅၅၀ | ၁၇၀ | ၂.၀၄ | 20 | ၄၆၀ | ၂၀၀ | |||
| FT-3530 | 12 | ၆၀၀၀ | 70 | ၄၅၀၀ | ၃၅၀ | ၄.၂ | ၁၁၀ | ၂၃၀၀ | ၄၄၀ | |||
| FT-3530 | 24 | ၄၅၀၀ | 40 | ၃၃၀၀ | ၁၅၀ | ၃.၆ | 50 | ၇၀၀ | ၂၇၀ | |||
| FT-3530 | 24 | ၆၀၀၀ | 40 | ၄၅၀၀ | ၂၀၀ | ၄.၈ | ၁၀၀ | ၁၄၀၀ | ၄၀၀ | |||
လျှောက်လွှာ
Round Spur ဂီယာမော်တာတွင် သေးငယ်သောအရွယ်အစား၊ ပေါ့ပါးပြီး ဂီယာထိရောက်မှုမြင့်မားသော ဝိသေသလက္ခဏာများရှိပြီး အမျိုးမျိုးသော အသေးစားစက်မှုကိရိယာများတွင် တွင်ကျယ်စွာအသုံးပြုပါသည်။ ဤသည်မှာ အသုံးများသော အပလီကေးရှင်းအခြေအနေအချို့ဖြစ်သည်။
စမတ်ကစားစရာများ- သေးငယ်သော DC spur ဂီယာမော်တာများသည် လှည့်ခြင်း၊ လွှဲခြင်း၊ တွန်းခြင်းစသည့် စမတ်အရုပ်များ၏ လုပ်ဆောင်ချက်အမျိုးမျိုးကို မောင်းနှင်နိုင်ပြီး အရုပ်များဆီသို့ ပိုမိုကွဲပြားပြီး စိတ်ဝင်စားစရာကောင်းသည့် လုပ်ဆောင်ချက်များကို ယူဆောင်လာပေးပါသည်။
စက်ရုပ်များ- အသေးစား DC spur ဂီယာမော်တာများ၏ သေးငယ်ပြီး ထိရောက်မှု မြင့်မားမှုသည် ၎င်းတို့အား စက်ရုပ်နယ်ပယ်၏ အရေးကြီးသော အစိတ်အပိုင်းတစ်ခု ဖြစ်လာစေသည်။ စက်ရုပ်ပူးတွဲလှုပ်ရှားမှု၊ လက်လှုပ်ရှားမှုနှင့် လမ်းလျှောက်ခြင်းစသည်တို့အတွက် အသုံးပြုနိုင်သည်။
ကုမ္ပဏီအကြောင်း









