





FT-37RGM31ZY 37mm tond spin gearmotor 31ZY muturi tubulari

Karatteristiċi:
Iż-żieda ta 'gearbox għal mutur DC mingħajr brushes tippermetti multiplikazzjoni tat-torque u tnaqqis tal-veloċità.

SPEĊIFIKAZZJONIJIET
L-ispeċifikazzjonijiet huma għal referenza biss. Ikkuntattjana għal data personalizzata.
| Numru tal-mudell | Volt nominali. | Ebda tagħbija | Tagħbija | Stalla | |||||
| Veloċità | Kurrenti | Veloċità | Kurrenti | Torque | Qawwa | Kurrenti | Torque | ||
| rpm | mA(massimu) | rpm | mA(massimu) | Kgf.cm | W | mA(min) | Kgf.cm | ||
| FT-32RGM38500610500-13K | 6V | 807 | 1000 | 601 | 3600 | 0.91 | 5.61 | 6800 | 3.3 |
| FT-32RGM3850129000-83K | 12V | 110 | 360 | 90 | 1300 | 2.7 | 2.49 | 3000 | 12 |
| FT-32RGM38502411000-61K | 24V | 180 | 300 | 170 | 780 | 2 | 3.49 | 6500 | 20 |
| FT-32RGM3850247000-61K | 24V | 115 | 160 | 104 | 280 | 1.5 | 1.60 | 1800 | 11.5 |
| FT-32RGM38502411000-83K | 24V | 134 | 300 | 102 | 850 | 5 | 5.23 | 4000 | 23 |
| Rimarka: 1 Kgf.cm≈0.098 Nm≈14 oz.in 1 mm≈0.039 in | |||||||||
DEJTA TAL-GEARBOX
| Stadju ta' tnaqqis | 2-stadji | 3-istadji | 4-istadji | 5-istadji | 6-stadji | 7-istadji |
| Proporzjon ta' tnaqqis | 6 | 13, 15 | 28, 32, 38 | 61, 71, 83, 96 | 135, 156, 182, 211, 245 | 296, 344, 400, 464, 540, 627 |
| Tul tal-gearbox (L) mm | 17.5 | 20 | 22.5 | 25 | 27.5 | 30 |
| Torque nominali massimu Kgf.cm | 2 | 2 | 2.5 | 4 | 6 | 8 |
| Torque momentarju massimu Kgf.cm | 3 | 3 | 4 | 6 | 10 | 12 |
| Effiċjenza tal-gearbox | 81% | 73% | 65% | 59% | 53% | 48% |
DEJTA TAL-MUTUR
| Mudell tal-mutur | Volt nominali. | Ebda tagħbija | Tagħbija | Stalla | |||||
| Kurrenti | Veloċità | Kurrenti | Veloċità | Torque | Qawwa | Torque | Kurrenti | ||
| V | mA | rpm | mA | rpm | gf.cm | W | gf.cm | mA | |
| FT-385 | 6 | ≤400 | 10000 | ≤2500 | 8400 | 80 | 7.04 | ≥430 | ≥8800 |
| FT-385 | 12 | ≤70 | 3000 | ≤260 | 1950 | 50 | 1.02 | ≥160 | ≥520 |
| FT-385 | 12 | ≤90 | 4500 | ≤460 | 3500 | 50 | 1.83 | ≥230 | ≥1300 |
| FT-385 | 24 | ≤80 | 3300 | ≤250 | 2750 | 74 | 2.13 | ≥290 | ≥440 |
| FT-385 | 24 | ≤120 | 7400 | ≤370 | 6400 | 60 | 4.02 | ≥420 | ≥1580 |
Din il-kombinazzjoni ħafna drabi tintuża f'applikazzjonijiet li jeħtieġu torque għoli u kontroll preċiż, bħal robotika, awtomazzjoni u vetturi elettriċi. L-għażla tal-mutur b'ingranaġġ DC mingħajr brushes tiddependi fuq ir-rekwiżiti speċifiċi tat-torque u l-veloċità tal-applikazzjoni. Fatturi li għandek tikkonsidra meta tagħżel mutur jinkludu proporzjon tal-ger, klassifikazzjoni tal-qawwa, piż, daqs, u vultaġġ u kurrent operattiv.
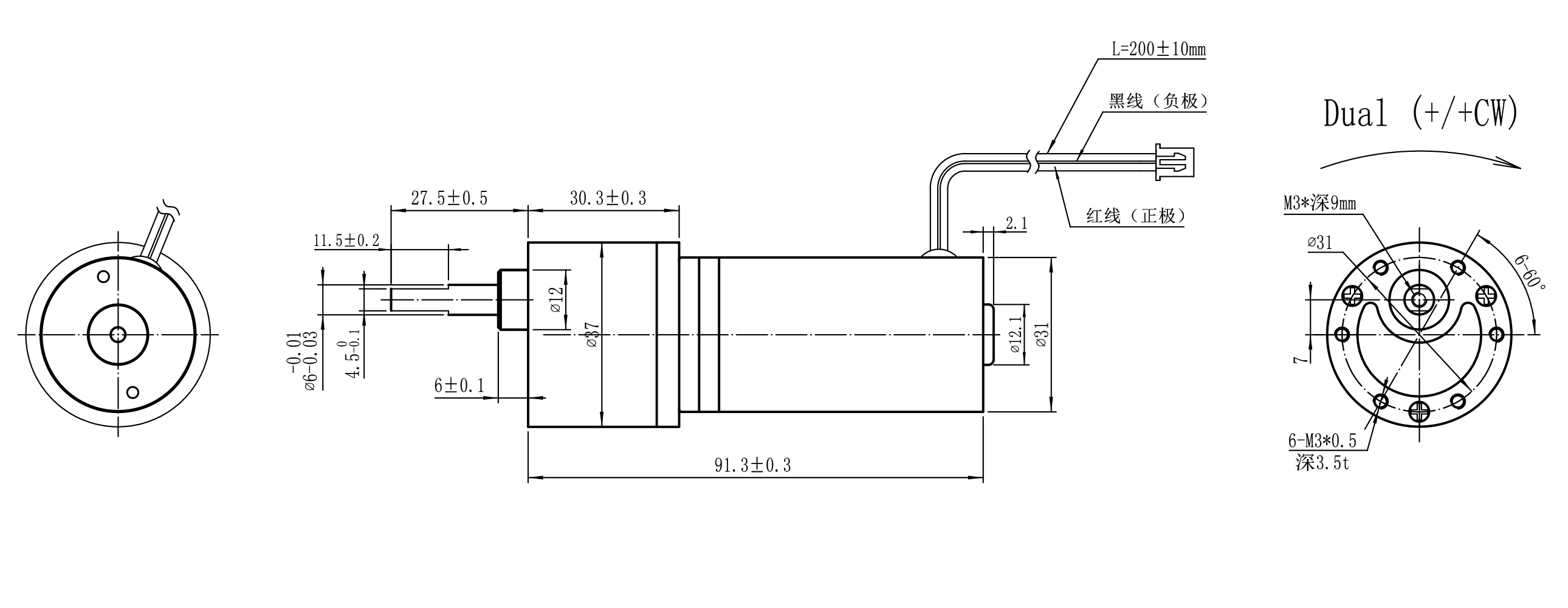
Tpinġija (MM)
Applikazzjoni
Il-mutur Round Spur gear għandu l-karatteristiċi ta 'daqs żgħir, piż ħafif u effiċjenza għolja ta' trasmissjoni, u huwa użat ħafna f'diversi tagħmir mekkaniku mikro. Hawn huma xi xenarji ta' applikazzjoni komuni:
Ġugarelli intelliġenti: Muturi żgħar ta 'spur gear DC jistgħu jsuqu azzjonijiet varji ta' ġugarelli intelliġenti, bħal tidwir, jixxengel, imbuttar, eċċ., Li jġibu funzjonijiet aktar diversi u interessanti għall-ġugarelli.
Robots: Il-minjaturizzazzjoni u l-effiċjenza għolja tal-muturi tal-irkaptu DC minjatura jagħmluhom parti importanti mill-qasam tar-robotika. Jista 'jintuża għall-attwazzjoni tal-ġonta tar-robot, moviment tal-idejn u mixi, eċċ.
Profil tal-Kumpanija









-

FT-37RGM555 Spur gear tnaqqis bil-mutur
-

FT-37RGM545 Round Spur gear bil-mutur bl-irkaptu aħmar...
-

FT-37RGM3626 PMDC 37mm Spur gear motor 3626 BLD...
-

FT-37RGM545 Torque għoli ħsejjes baxxi 37mm Spur gea...
-

FT-37RGM530 Spur gear bil-mutur b'kontroll tal-veloċità...
-

FT-37RGM500 Spur gear muturi mutur robotiku