





FT-37RGM3530 37 mm spyruoklinis variklis Ašis centre





Savybės:
Centrinis krumplinės pavaros variklis paprastai reiškia variklį, kurio išėjimo velenas yra suderintas su variklio velenu, tai reiškia, kad jie abu yra variklio korpuso centre.
Ši konfigūracija leidžia pasiekti kompaktiškesnį dizainą ir efektyvesnį energijos perdavimą. Šioje sąrankoje variklio sukimosi jėga perduodama tiesiai į išėjimo veleną per eilę krumpliaračių, ypač krumpliaračių.
Produkto vaizdo įrašas
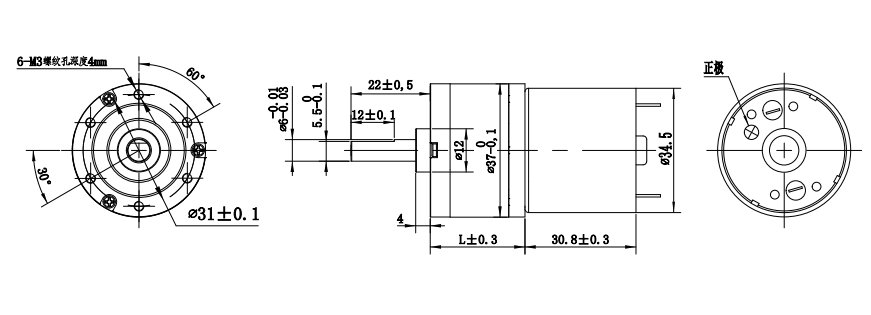
BRĖŽINIS (MM)
Pavarų dėžės duomenys:
| Pavarų serija | 3 | 4 | 5 | 6 | 7 | 8 | ||||||
| Sumažinimo koeficientas (K) | 10.6 | 24.4 | 42.7 | 74.7 | 130.8 | 228 | ||||||
| Pavarų dėžės ilgis L (mm) | 23 | 26.3 | 28.8 | 31.7 | 34.5 | 37.3 | ||||||
| Nominalus sukimo momentas (kg · cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Momentinis sukimo momentas (kg · cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Pavarų dėžės efektyvumas (%) | 73 % | 65 % | 58 % | 52 % | 47 % | 42 % | ||||||
Variklio duomenys:
| Variklio modelis | Nėra apkrovos | Įkelti | Stalas | |||||||||
| Nominali įtampa | Greitis | Dabartinė | Greitis | Dabartinė | Išvestis | Sukimo momentas | Dabartinė | Sukimo momentas | ||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g · cm) | (mA) | (g · cm) | ||||
| FT-3530 | 12 | 3000 | 60 | 2550 | 170 | 2.04 | 20 | 460 | 200 | |||
| FT-3530 | 12 | 6000 | 70 | 4500 | 350 | 4.2 | 110 | 2300 | 440 | |||
| FT-3530 | 24 | 4500 | 40 | 3300 | 150 | 3.6 | 50 | 700 | 270 | |||
| FT-3530 | 24 | 6000 | 40 | 4500 | 200 | 4.8 | 100 | 1400 | 400 | |||
Taikymas
„Round Spur“ pavarų dėžės variklis turi mažo dydžio, lengvo svorio ir didelio perdavimo efektyvumo charakteristikas ir yra plačiai naudojamas įvairioje mikro mechaninėje įrangoje. Štai keletas bendrų taikymo scenarijų:
Išmanieji žaislai: Miniatiūriniai nuolatinės srovės spyruokliniai varikliai gali valdyti įvairius išmaniųjų žaislų veiksmus, pvz., sukti, siūbuoti, stumti ir pan., suteikdami žaislams įvairesnių ir įdomesnių funkcijų.
Robotai: Miniatiūrinių nuolatinės srovės krumpliaračių variklių miniatiūrizavimas ir didelis efektyvumas daro juos svarbia robotikos srities dalimi. Jis gali būti naudojamas roboto sąnarių valdymui, rankų judesiams ir vaikščiojimui ir kt.
Įmonės profilis




-

FT-37RGM3540 37 mm spyruoklinis variklis 350 variklis su...
-

FT-37RGM3626 PMDC 37 mm spyruoklinis variklis 3626 BLD...
-

FT-37RGM520 12V 24v nuolatinės srovės pavaros variklis 37mm pavara...
-

FT-37RGM500 Spur pavarų dėžės variklis robotas
-

FT-37RGM3530-641K nuolatinės srovės pavaros varikliai, skirti savaiminiam išsivalymui...
-

FT-37RGM530 37 mm spyruoklinis variklis