





In motu mechanico automation, motor necessaria pars est. In classificatione motorum sunt motores frequentissimi et magniDC calces motorumet motoribus stepper. Quamvis sint motores ambo, magnae sunt differentiae duorum. Haec differentiam inter motores dc reductione et motores stepperos in specie inducemus.
DC reductionem motoris


Principium 1. Opus
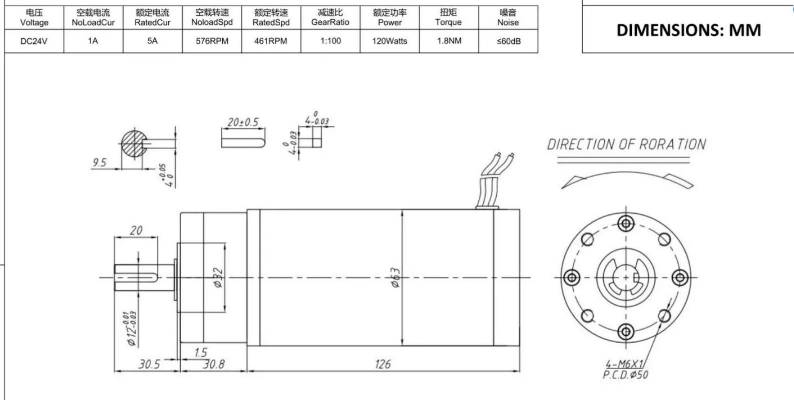
TheDC calces motorverticitatem campi magnetici intra motorem per positivi et negativi currentis externi mutat, ita rotationem motoris cognoscens. In output puteiDC apparatus motorintegratur cum reducendo ad redigendum in output rotationis celeritatem et torquem motoris augendum ut motor oneris accommodare possit.
2. Features
TheDC calces motor magna efficacia, amplis operibus amplis, gravis pecuniaria. Maxime convenit ad applicationes missionum altas torques requirentium, ut onera mechanica et systemata automataria, sed simul, propter magnum damnum electromagneticum, sustentationem et sollicitudinem certas artes professionales requirunt.
Stepper motricium
Principium opus 1 .
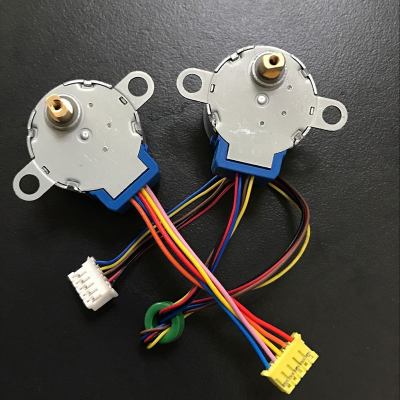
Motor stepper agit motorem ad quemdam angulum gyrari, cum polaritatem campi electromagnetici sui in potentia in continuo mutando. Dividitur in duo genera: una stepperus unicus est motor, alter est motor gradus trium phase. Puteus output motoris stepperi coniungitur cum convertente vel reducendo ad angulum et velocitatem refrenandum.
Features
Motores stepper altam praecisionem, accuratam potestatem habent, ac sileo ac statim incipiunt. Praecipue aptae sunt ad applicationes missiones cum exacta potestate requisita, ut typographi digitales, sclopetarii laser, et ostensiones LCD. Sed simul, cum stepper motore vecturae hastile strepitum mechanicum habeat, motores stepper non sunt optimae electionis cum operatio humilis strepitus requiritur.
Differentia inter DC reductionem motoris et motoris stepper
| Differentiae | DC calces motor | Stepper motricium |
| Principium opus | Mutare verticitatem campi magnetici intra motorem applicando positivi et negativi
| Motricium eius campi electromagnetici cum potestate in vertibilitatem continue mutando impellitur ad quendam angulum rotationis producendum. |
| output hastile | Integrated reducer ad redigendum in output gyrationis celeritatem et augendam torques motoris | Composita cum convertente vel minuente angulum et celeritatem regere potest |
| Application missiones | Idonea ad missiones altas torques requirunt sicut onera mechanica et systemata automataria | Apta summus praecisio imperium et sileo sui ipsius initium applicationis missionum, sicut digitales typographos, laser scanners, LCD ostendimus |
| commoda | Maximum efficientiam, amplitudinem laboris, humilem valorem pecuniarium | Magna cura, accurata moderatio, et sileo sui ipsius initium continua |
| Incommoda | Maximum electromagneticum lapsum, professionales artes ad sustentationem et fermentum requirunt | A coegi hastile strepitu mechanica |
conclusio
Denique,DC calces motorum ac motores gradatim sua commoda et incommoda habent, ac applicatio missionum etiam diversae sunt. Aliquot missiones quae requirunt altam flexibilitatem moderationis et praecise praecise, sicut robots glutino et CNC, stepper motorum moderatio plerumque adhibetur, dum missiones quae requirunt ieiunium, efficientes, certae, et non valde exquisite requiruntur, sicut linea convehentium conventus sunt. vulgo moderata DC motorum reductione.
Post tempus: Oct-18-2024