





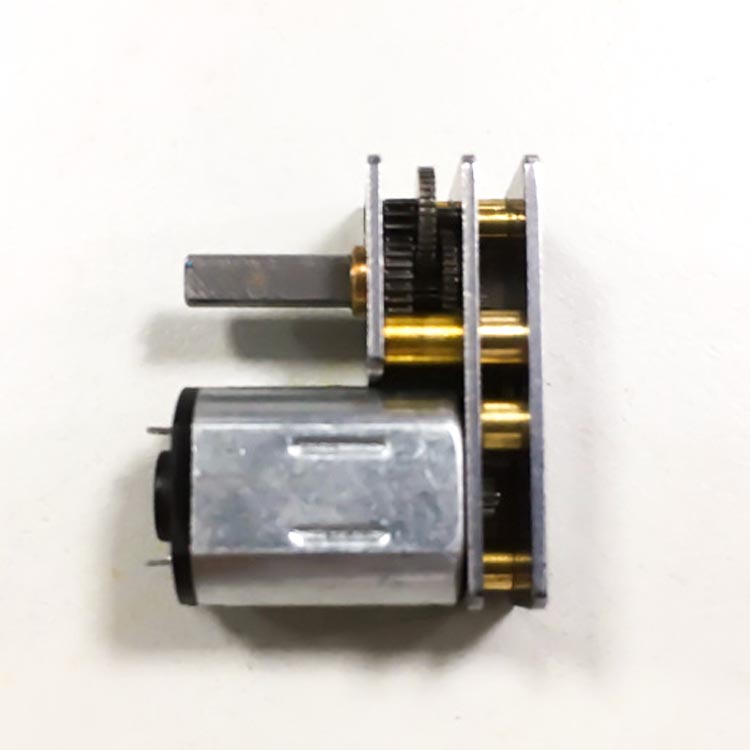
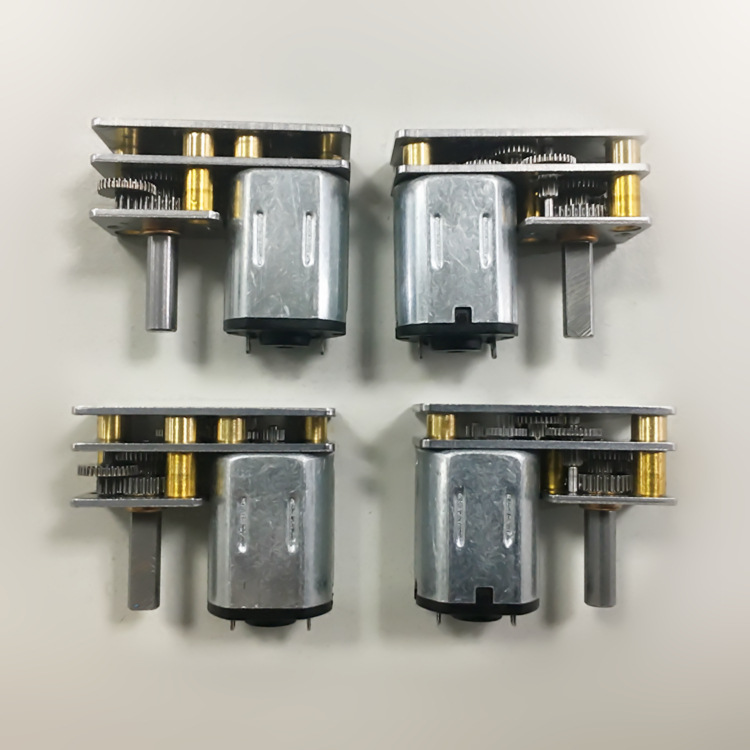
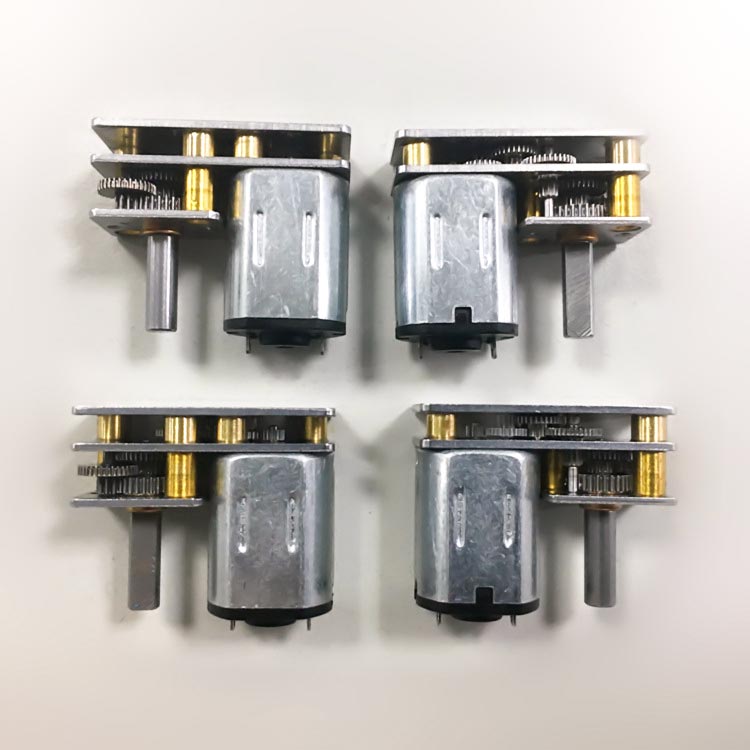
Mini dc gearmotor 12v micro dc motoribus





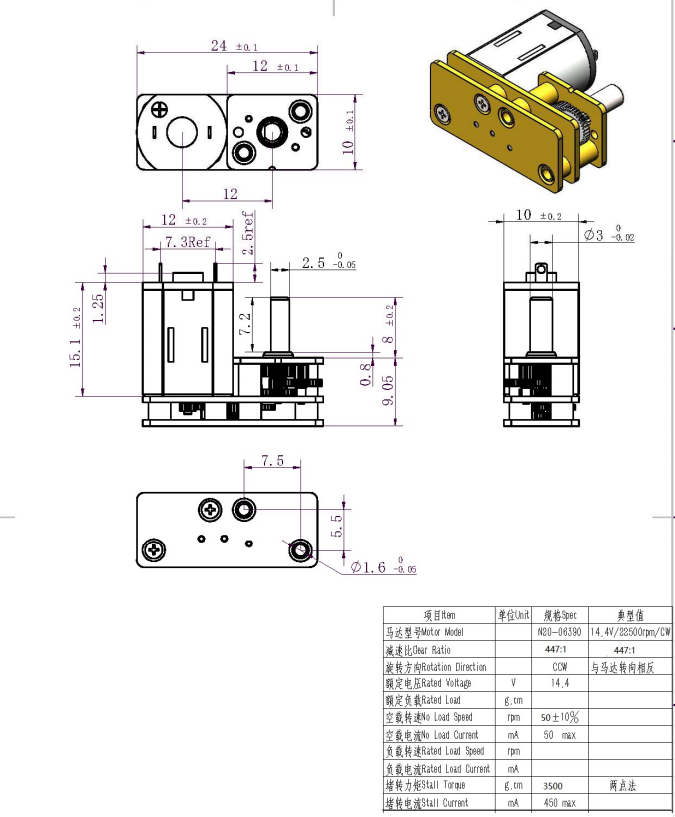
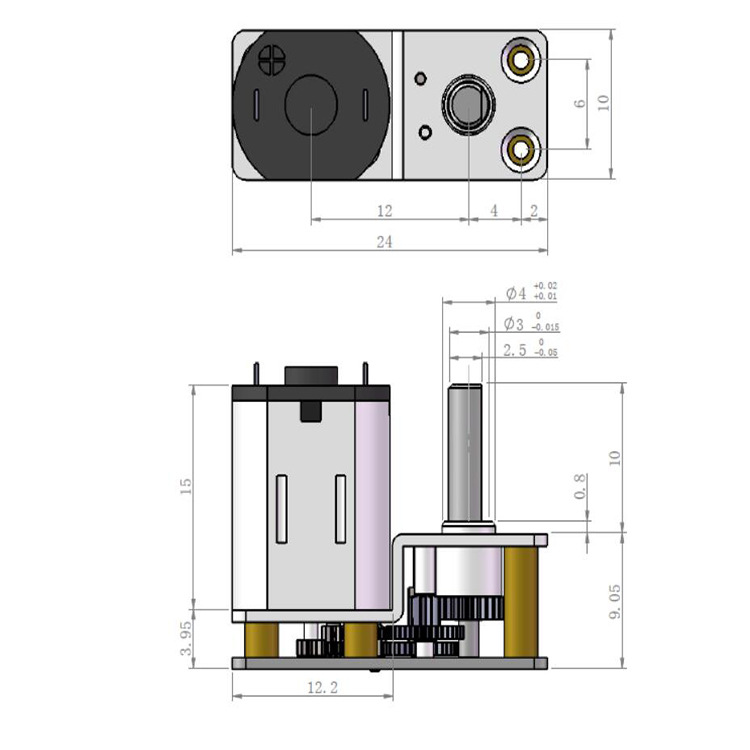
Dimensiones (MM)
Gearbox Data:
| Numerus calces | 2 | 3 | 4 | 5 | 7 | |||||||
| Reductio Ratio(K) | 10 | 20、30 | 50、63、100 | 150、210、250、298、360 | 960、1000 | |||||||
| Gearbox longitudo (mm) | 9 | 9 | 9 | 9 | 12 | |||||||
| Ratum est Torquekg·cm) | 0.3 | 0.4 | 0.6 | 1 | 1 | |||||||
| Stall Aureus kg·cm) | 0.9 | 1.2 | 1.8 | 3 | 3 | |||||||
| Gearbxo Efficiency(%) | 81% | 73% | 65% | 59% | 48% | |||||||
Applicationem Motor Data:
| Motor Model | Non Load | Load | Stall | |||||||||
| Rated Voltage | Celeritas | Current | Celeritas | Current | Output | Torque | Current | Torque | ||||
| V | rpm) | mA) | rpm) | mA) | (w) | g·cm) | mA) | g·cm) | ||||
| FT-N20 | 2.4 | 15800 | 96 | 12200 | 330 | 0.35 | 2.8 | 1150 | 13 | |||
| FT-N20 | 3 | 12100 | 45 | 9390 | 160 | 0.2 | 2.1 | 540 | 9.4 | |||
| FT-N20 | 6 | 10400 | 20 | 8000 | 40 | 0.25 | 3 | 150 | 12 | |||
| FT-N20 | 6 | 15500 | 35 | 12400 | 80 | 0.52 | 4 | 350 | 18 | |||
1、 Praecedentes parametri motores referendi, ipsum exemplum referre placet.
2、 parametri motoris et scapus output amplitudo nativus fieri potest.
3、 Output torque = motor torque * reductionis ratio * calces efficientiam.
Output Celeritas = motor celeritas/reductio ratio.
Turba Profile








