





Di tevgera xweseriya mekanîkî de, motor hêmanek domdar e. Di dabeşkirina motoran de, motorên herî gelemperî û girîng inmotorên gear DCû motorên gavê. Her çend ew her du motor in jî, di navbera her duyan de cûdahiyên mezin hene. Ya jêrîn dê cûdahiya di navbera motorên kêmkirina DC û motorên gavê de bi hûrgulî destnîşan bike.
motora kêmkirina DC


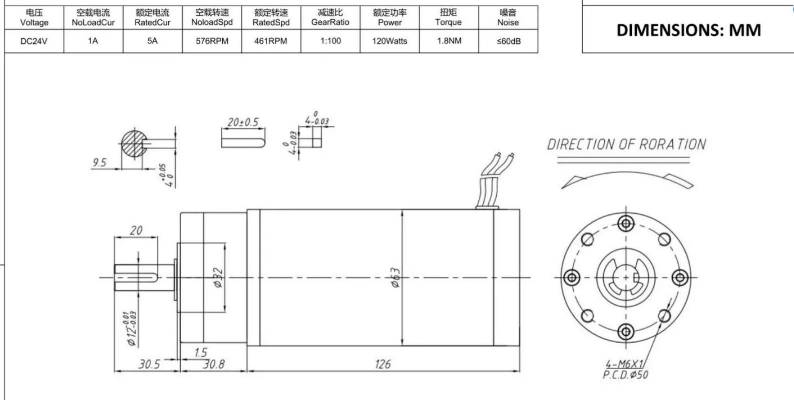
1. Prensîba xebatê
Ewmotor gear DCpolarîteya qada magnetîkî ya di hundurê motorê de ji hêla herika erênî û neyînî ya herika derveyî ve diguhezîne, bi vî rengî zivirîna motorê fam dike. Mifteya derketinê yaMotora gearkirî ya DCbi kêmkerek re yekgirtî ye da ku leza zivirîna encam kêm bike û torque motorê zêde bike da ku bicîh bike ku motor dikare bi barkirinê re adapte bibe.
2. Taybetmendî
Ewmotor gear DC xwedan karbidestiya bilind, karek berfireh, û nirxa diravî ya kêm e. Ew bi taybetî ji bo senaryoyên serîlêdanê yên ku hewceyê torkek bilind hewce dike, mîna barkirinên mekanîkî û pergalên kontrolê yên otomatîkî, maqûl e, lê di heman demê de, ji ber windabûna wê ya mezin a elektromagnetîk, lênihêrîn û çareserkirina pirsgirêkê hin jêhatîbûnên profesyonel hewce dike.
Stepper motor
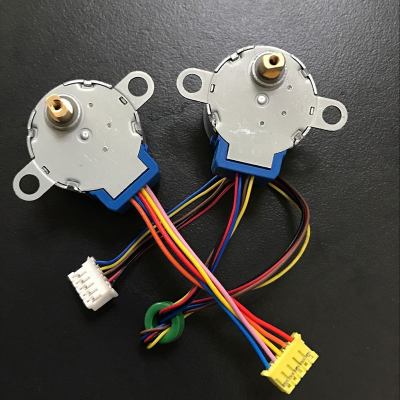
Prensîba xebatê 1.
Motorek gavê motorê bi guheztina domdar a polarîteya qada xweya elektromagnetîk dema ku tê pêvekirin motorê bi rengek diyar dizivire. Ew di du celeb de tê dabeş kirin: yek motora gavê ya yek-qonaxê ye û ya din motora gavê ya sê-qonaxê ye. Mîla derencamê ya motora gavê bi veguherînerek an kêmkerek ve tête hev kirin da ku goşe û lezê kontrol bike.
Features
Motorên Stepper xwedan rastbûnek bilind, kontrolek rastîn in, û dikarin bixweber dest pê bikin û dest pê bikin. Ew bi taybetî ji bo senaryoyên serîlêdanê yên bi hewcedariyên kontrolê yên rast-bilind, wek çaperên dîjîtal, skanerên lazer, û dîmenderên LCD-ê maqûl in. Lêbelê, di heman demê de, ji ber ku mîlî ajotina motora gavê xwedan dengê mekanîkî ye, motorên gavê ne bijareya çêtirîn in dema ku operasyona kêm-deng hewce ye.
Cûdahiya di navbera motora kêmkirina DC û motora gavê de
| Cudahiyên | motor gear DC | Stepper motor |
| Prensîba xebatê | Bi sepandina herikîna erênî û neyînî polarîteya qada magnetîkî ya di hundurê motorê de biguhezînin
| Bi guheztina domdar a polarîteya qada xweya elektromagnetîk dema ku tê hêz kirin, motor tê guheztin da ku goşeyek zivirandinê çêbike. |
| mîlî derketinê | Reduktorek yekbûyî da ku leza zivirîna encam kêm bike û torque ya motorê zêde bike | Bi veguherînerek an kêmker re, ew dikare goşe û lezê kontrol bike |
| senaryoyên sepanê | Minasib ji bo senaryoyên ku pêdiviya wan bi torque bilind heye, mîna barkirinên mekanîkî û pergalên kontrola otomatîkî | Ji bo kontrolkirina rast-bilind maqûl e û senaryoyên serîlêdana xwe-destpêkirinê ji nû ve dest pê dike, wek çapkerên dîjîtal, skanerên lazer, ekranên LCD. |
| Avantajên | Karbidestiya bilind, qada xebatê ya berfireh, nirxa diravî ya kêm | Rastiya bilind, kontrolkirina rast, û xwe-destpêkirina ji nû ve domdar |
| Dezavantajên | Kincên elektromagnetîk ên bilind, ji bo parastin û çareserkirina pirsgirêkan jêhatîbûnên profesyonel hewce dike | Mîla ajotinê dengek mekanîkî heye |
Xelasî
Bi kurtî,motorên gear DC û motorên gavê xwedî avantaj û dezawantajên xwe ne, û senaryoyên serîlêdana wan jî cûda ne. Ji bo hin senaryoyên ku hewceyê kontrolkirina nermbûn û rastbûna zêde hewce dikin, wek robotên welding û CNC, bi gelemperî kontrola motora gavê tê bikar anîn, dema ku senaryoyên ku hewcedariyên pêbaweriya bilez, bikêrhatî, pêbawer û ne pir zêde hewce dikin, wek veguhêzên xeta kombûnê, ne. bi gelemperî ji hêla motorên kêmkirina DC ve têne kontrol kirin.
Dema şandinê: Oct-18-2024