





FT-37RGM545 Round Spur motora pêlavê ya bi kêmkirina gearê







Taybetmendî:
Li Forto, em ji bo peydakirina çareseriyên qalîteya bilind ên ku ji hêviyên xerîdarên me derbas dibin, pabend in. Gearboksên me yên 37 mm yên dorhêl teknolojiya pêşkeftî, pêbawerî û piralîûçalakiyê bi hev re dikin ku ji bo sepanên ajokera motora we çareseriya îdeal peyda bikin.
Daneyên Gearbox:
| series Gear | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Rêjeya kêmkirinê (K) | 6.8, 10 | 20, 30, 40, 46 | 61, 90 100.103 | 115, 138, 160, 163, 184, 270, 300 | 310, 414, 552, 614 641, 810, 900 | 932, 1243, 1657 2430, 2700 | ||||||
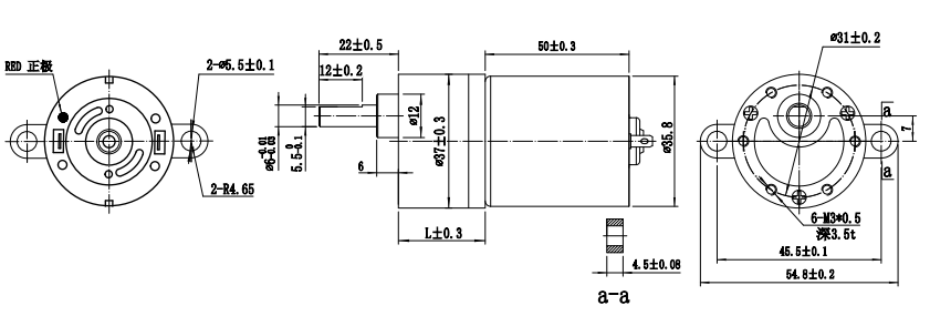
| Dirêjahiya gearboksêL(mm) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| torque binavkirî (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| torque tavilê (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Karbidestiya Gearbox (%) | Rêsakanî bekarhênan 81% | Rêsakanî bekarhênan 73% | Rêsakanî bekarhênan 65% | Rêsakanî bekarhênan 59% | Rêsakanî bekarhênan 53% | Rêsakanî bekarhênan 48% | ||||||
Daneyên Gearbox:
| Model Motor | Voltaja binavkirî | No Load | Dawetkirin | Axûr | ||||||||
| Zûbûnî | Vêga | Zûbûnî | Vêga | Karûabr | Torque | Vêga | Torque | |||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Bikaranînî
Motora gear a Round Spur xwedan taybetmendiyên mezinahiya piçûk, giraniya sivik û karbidestiya veguhestina bilind e, û bi berfirehî di cûrbecûr alavên mekanîkî yên mîkro de tê bikar anîn. Li vir çend senaryoyên serîlêdanê yên hevpar hene:
Lîstokên biaqil: Motorên gemarê yên mînyaturî yên DC-ê dikarin çalakiyên cihêreng ên pêlîstokên biaqil bimeşînin, wek zivirandin, hejandin, pêxistin, hwd., û fonksiyonên cihêreng û balkêştir ji pêlîstokan re bînin.
Robot: Mînyaturîzekirin û karîgeriya bilind a motorên gemarê yên mînyatur DC spur wan dike beşek girîng a qada robotîkê. Ew dikare ji bo çalakkirina hevbeş robot, tevgera dest û meşîn, hwd.
Profîla Pargîdaniyê









