





FT-37RGM3530 37mm Spur motora gear Axa li navendê





Taybetmendî:
Motorek pêlavê ya navendê bi gelemperî motorek ku tê de şaneya derketinê bi mîla motorê re hevaheng e, tê vê wateyê ku ew her du jî li navenda xaniyê motorê ne.
Ev veavakirin rê dide sêwiranek tevlihevtir û veguheztina hêzê ya bikêrtir. Di vê sazkirinê de, hêza zivirîna motorê rasterast bi navgînek gemaran ve, bi taybetî gemaran, rasterast ji mîla derketinê re tê veguheztin.
Vîdyoya Hilberê
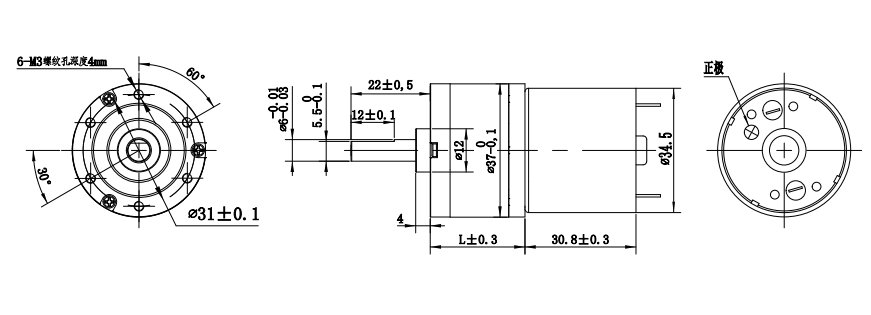
DAWÎ (MM)
Daneyên Gearbox:
| series Gear | 3 | 4 | 5 | 6 | 7 | 8 | ||||||
| Rêjeya kêmkirinê (K) | 10.6 | 24.4 | 42.7 | 74.7 | 130.8 | 228 | ||||||
| Dirêjahiya gearboksêL(mm) | 23 | 26.3 | 28.8 | 31.7 | 34.5 | 37.3 | ||||||
| torque binavkirî (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| torque tavilê (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Karbidestiya Gearbox (%) | Rêsakanî bekarhênan 73% | Rêsakanî bekarhênan 65% | Rêsakanî bekarhênan 58% | Rêsakanî bekarhênan 52% | Rêsakanî bekarhênan 47% | Rêsakanî bekarhênan 42% | ||||||
Daneyên motorê:
| Model Motor | No Load | Dawetkirin | Axûr | |||||||||
| Voltaja binavkirî | Zûbûnî | Vêga | Zûbûnî | Vêga | Karûabr | Torque | Vêga | Torque | ||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-3530 | 12 | 3000 | 60 | 2550 | 170 | 2.04 | 20 | 460 | 200 | |||
| FT-3530 | 12 | 6000 | 70 | 4500 | 350 | 4.2 | 110 | 2300 | 440 | |||
| FT-3530 | 24 | 4500 | 40 | 3300 | 150 | 3.6 | 50 | 700 | 270 | |||
| FT-3530 | 24 | 6000 | 40 | 4500 | 200 | 4.8 | 100 | 1400 | 400 | |||
Bikaranînî
Motora gear a Round Spur xwedan taybetmendiyên mezinahiya piçûk, giraniya sivik û karbidestiya veguhestina bilind e, û bi berfirehî di cûrbecûr alavên mekanîkî yên mîkro de tê bikar anîn. Li vir çend senaryoyên serîlêdanê yên hevpar hene:
Lîstokên biaqil: Motorên gemarê yên mînyaturî yên DC-ê dikarin çalakiyên cihêreng ên pêlîstokên biaqil bimeşînin, wek zivirandin, hejandin, pêxistin, hwd., û fonksiyonên cihêreng û balkêştir ji pêlîstokan re bînin.
Robot: Mînyaturîzekirin û karîgeriya bilind a motorên gemarê yên mînyatur DC spur wan dike beşek girîng a qada robotîkê. Ew dikare ji bo çalakkirina hevbeş robot, tevgera dest û meşîn, hwd.
Profîla Pargîdaniyê









