





FT-37RGM31ZY 37mm gearmotor gear 31ZY motorên tubular

Taybetmendî:
Zêdekirina gearboxek li motorek DC ya bê firçe rê dide zêdekirina torkê û kêmkirina lezê.

SPECIFICATIONS
Taybetmendî tenê ji bo referansê ne. Ji bo daneyên xwerû bi me re têkilî daynin.
| Hejmara modelê | volt binavkirî. | No load | Dawetkirin | Axûr | |||||
| Zûbûnî | Vêga | Zûbûnî | Vêga | Torque | Erk | Vêga | Torque | ||
| rpm | mA (herî zêde) | rpm | mA (herî zêde) | Kgf.cm | W | mA(min) | Kgf.cm | ||
| FT-32RGM38500610500-13K | 6V | 807 | 1000 | 601 | 3600 | 0.91 | 5.61 | 6800 | 3.3 |
| FT-32RGM3850129000-83K | 12V | 110 | 360 | 90 | 1300 | 2.7 | 2.49 | 3000 | 12 |
| FT-32RGM38502411000-61K | 24V | 180 | 300 | 170 | 780 | 2 | 3.49 | 6500 | 20 |
| FT-32RGM3850247000-61K | 24V | 115 | 160 | 104 | 280 | 1.5 | 1.60 | 1800 | 11.5 |
| FT-32RGM38502411000-83K | 24V | 134 | 300 | 102 | 850 | 5 | 5.23 | 4000 | 23 |
| Nîşe: 1 Kgf.cm≈0,098 Nm≈14 oz.di 1 mm≈0,039 in | |||||||||
DATA GEARBOX
| Qonaxa kêmkirinê | 2-qonaxa | 3-qonaxa | 4-qonaxa | 5-qonaxa | 6-qonaxa | 7-qonaxa |
| Rêjeya kêmkirina | 6 | 13, 15 | 28, 32, 38 | 61, 71, 83, 96 | 135, 156, 182, 211, 245 | 296, 344, 400, 464, 540, 627 |
| Dirêjahiya gearboxê (L) mm | 17.5 | 20 | 22.5 | 25 | 27.5 | 30 |
| torque rated herî Kgf.cm | 2 | 2 | 2.5 | 4 | 6 | 8 |
| Zexta demkî ya herî zêde Kgf.cm | 3 | 3 | 4 | 6 | 10 | 12 |
| karîgeriya Gearbox | Rêsakanî bekarhênan 81% | Rêsakanî bekarhênan 73% | Rêsakanî bekarhênan 65% | Rêsakanî bekarhênan 59% | Rêsakanî bekarhênan 53% | Rêsakanî bekarhênan 48% |
DATA MOTOR
| Modela motorê | Rêjeya Volt. | No load | Dawetkirin | Axûr | |||||
| Vêga | Zûbûnî | Vêga | Zûbûnî | Torque | Erk | Torque | Vêga | ||
| V | mA | rpm | mA | rpm | gf.cm | W | gf.cm | mA | |
| FT-385 | 6 | ≤400 | 10000 | ≤2500 | 8400 | 80 | 7.04 | ≥430 | ≥8800 |
| FT-385 | 12 | ≤70 | 3000 | ≤260 | 1950 | 50 | 1.02 | ≥160 | ≥520 |
| FT-385 | 12 | ≤90 | 4500 | ≤460 | 3500 | 50 | 1.83 | ≥230 | ≥1300 |
| FT-385 | 24 | ≤80 | 3300 | ≤250 | 2750 | 74 | 2.13 | ≥290 | ≥440 |
| FT-385 | 24 | ≤120 | 7400 | ≤370 | 6400 | 60 | 4.02 | ≥420 | ≥1580 |
Ev tevlihevî pir caran di serîlêdanên ku hewceyê torque bilind û kontrolek rastîn hewce dike, wekî robotîk, otomasyon û wesayîtên elektrîkê tê bikar anîn. Hilbijartina motora DC ya bê firçe bi pêdiviya torque û leza taybetî ya serîlêdanê ve girêdayî ye. Faktorên ku di hilbijartina motorê de têne hesibandin, rêjeya gear, rêjeya hêzê, giranî, mezinahî, û voltaja xebitandinê û niha hene.
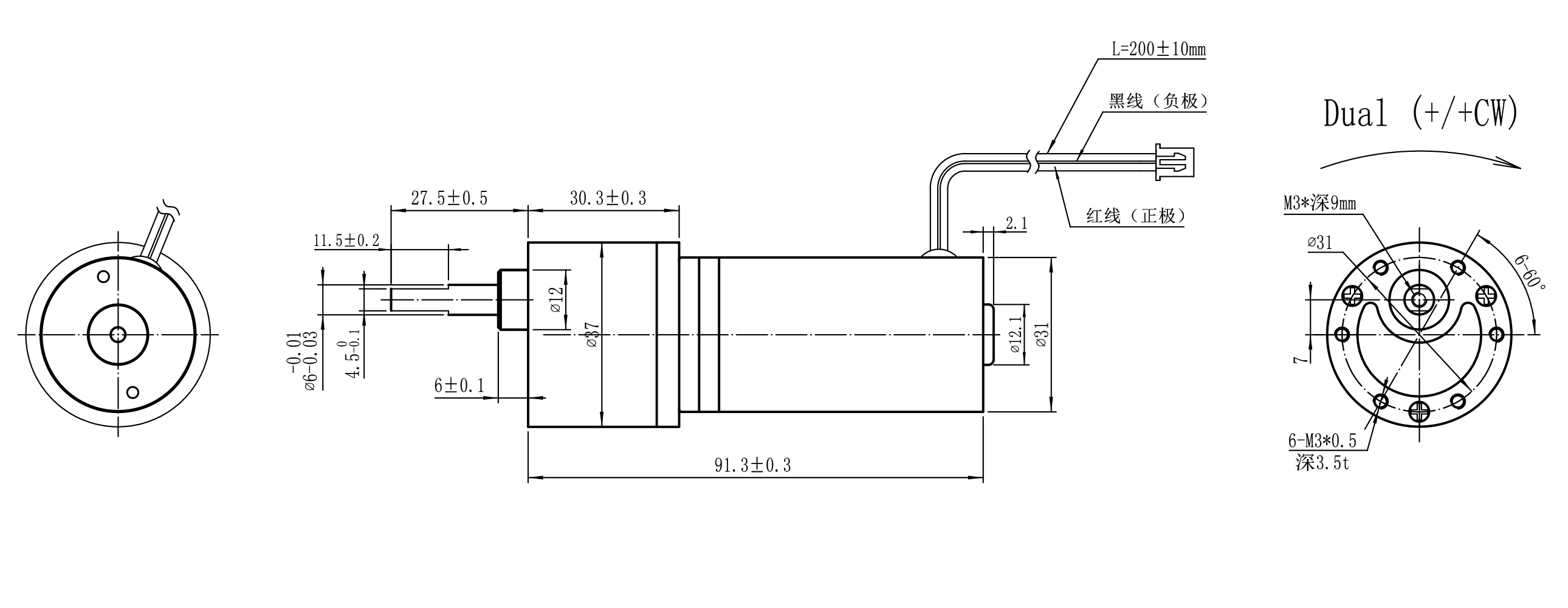
DAWÎ (MM)
Bikaranînî
Motora gear a Round Spur xwedan taybetmendiyên mezinahiya piçûk, giraniya sivik û karbidestiya veguhestina bilind e, û bi berfirehî di cûrbecûr alavên mekanîkî yên mîkro de tê bikar anîn. Li vir çend senaryoyên serîlêdanê yên hevpar hene:
Lîstokên biaqil: Motorên gemarê yên mînyaturî yên DC-ê dikarin çalakiyên cihêreng ên pêlîstokên biaqil bimeşînin, wek zivirandin, hejandin, pêxistin, hwd., û fonksiyonên cihêreng û balkêştir ji pêlîstokan re bînin.
Robot: Mînyaturîzekirin û karîgeriya bilind a motorên gemarê yên mînyatur DC spur wan dike beşek girîng a qada robotîkê. Ew dikare ji bo çalakkirina hevbeş robot, tevgera dest û meşîn, hwd.
Profîla Pargîdaniyê














