





FT-37RGM3530 37 მმ Spur გადაცემათა ძრავის ღერძი ცენტრში





მახასიათებლები:
ცენტრალური გადაცემის ძრავა ზოგადად ეხება ძრავას, რომელშიც გამომავალი ლილვი გასწორებულია ძრავის ლილვთან, რაც ნიშნავს, რომ ორივე მდებარეობს ძრავის კორპუსის ცენტრში.
ეს კონფიგურაცია საშუალებას იძლევა უფრო კომპაქტური დიზაინი და უფრო ეფექტური ენერგიის გადაცემა. ამ კონფიგურაციაში, ძრავის ბრუნვის ძალა გადაეცემა პირდაპირ გამომავალ ლილვზე გადაცემათა სერიის მეშვეობით, კონკრეტულად აჩქარებული გადაცემათა კოლოფი.
პროდუქტის ვიდეო
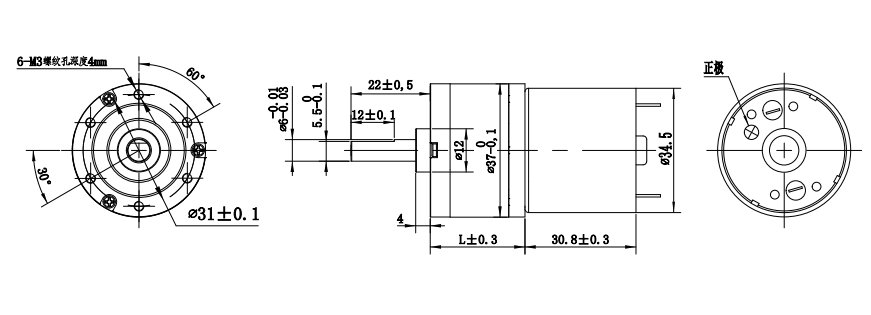
ნახატი (მმ)
გადაცემათა კოლოფის მონაცემები:
| გადაცემათა სერია | 3 | 4 | 5 | 6 | 7 | 8 | ||||||
| შემცირების კოეფიციენტი (K) | 10.6 | 24.4 | 42.7 | 74.7 | 130.8 | 228 | ||||||
| გადაცემათა კოლოფის სიგრძე L (მმ) | 23 | 26.3 | 28.8 | 31.7 | 34.5 | 37.3 | ||||||
| რეიტინგული ბრუნვის მომენტი (კგ· სმ) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| მყისიერი ბრუნვის მომენტი (კგ· სმ) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| გადაცემათა კოლოფის ეფექტურობა (%) | 73% | 65% | 58% | 52% | 47% | 42% | ||||||
ძრავის მონაცემები:
| ძრავის მოდელი | დატვირთვის გარეშე | ჩატვირთვა | სადგომი | |||||||||
| რეიტინგული ძაბვა | სიჩქარე | მიმდინარე | სიჩქარე | მიმდინარე | გამომავალი | ბრუნვის მომენტი | მიმდინარე | ბრუნვის მომენტი | ||||
| V | (rpm) | (mA) | (rpm) | (mA) | (ვ) | (გ · სმ) | (mA) | (გ · სმ) | ||||
| FT-3530 | 12 | 3000 | 60 | 2550 | 170 | 2.04 | 20 | 460 | 200 | |||
| FT-3530 | 12 | 6000 | 70 | 4500 | 350 | 4.2 | 110 | 2300 | 440 | |||
| FT-3530 | 24 | 4500 | 40 | 3300 | 150 | 3.6 | 50 | 700 | 270 | |||
| FT-3530 | 24 | 6000 | 40 | 4500 | 200 | 4.8 | 100 | 1400 წ | 400 | |||
განაცხადი
Round Spur გადაცემათა ძრავას აქვს მცირე ზომის, მსუბუქი წონის და გადაცემის მაღალი ეფექტურობის მახასიათებლები და ფართოდ გამოიყენება სხვადასხვა მიკრომექანიკურ აღჭურვილობაში. აქ მოცემულია რამდენიმე გავრცელებული განაცხადის სცენარი:
ჭკვიანი სათამაშოები: მინიატურული DC სტიმულატორის გადაცემათა ძრავებს შეუძლიათ მართონ ჭკვიანი სათამაშოების სხვადასხვა მოქმედებები, როგორიცაა შემობრუნება, რხევა, ბიძგი და ა.შ., რაც სათამაშოებს უფრო მრავალფეროვან და საინტერესო ფუნქციებს მოუტანს.
რობოტები: მინიატურული DC სტიმულატორის გადაცემათა ძრავების მინიატურიზაცია და მაღალი ეფექტურობა მათ რობოტიკის დარგის მნიშვნელოვან ნაწილად აქცევს. მისი გამოყენება შესაძლებელია რობოტის სახსრის გასააქტიურებლად, ხელის მოძრაობისა და სიარულისთვის და ა.შ.
კომპანიის პროფილი




-

FT-37RGM3540 37 მმ Spur გადაცემათა ძრავა 350 ძრავით...
-

FT-37RGM3626 PMDC 37 მმ Spur გადაცემათა ძრავა 3626 BLD...
-

FT-37RGM520 12V 24v dc გადაცემათა ძრავა 37მმ გადაცემათა კოლოფი მ...
-

FT-37RGM500 Spur გადაცემათა ძრავის რობოტული ძრავა
-

FT-37RGM3530-641K DC გადაცემათა ძრავები თვითწმენდისთვის...
-

FT-37RGM530 37 მმ Spur გადაცემათა ძრავა