





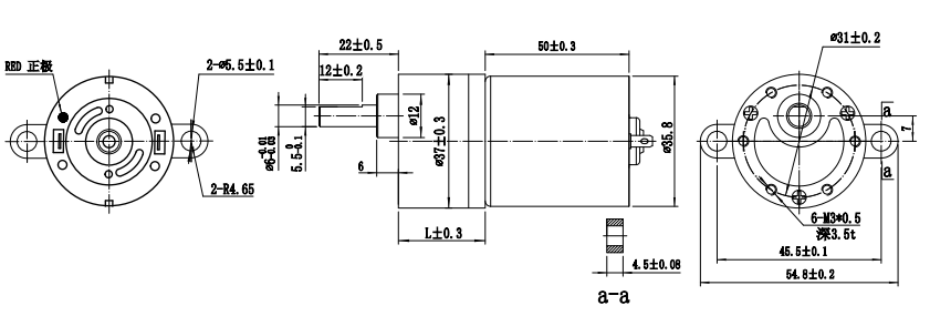
FT-37RGM545 Motoriduttore tondo a denti cilindrici con riduttore







Caratteristiche:
Noi di Forto ci impegniamo a fornire soluzioni di alta qualità che superino le aspettative dei nostri clienti. I nostri riduttori circolari a denti cilindrici da 37 mm combinano tecnologia all'avanguardia, affidabilità e versatilità per fornire la soluzione ideale per le vostre applicazioni di azionamento del motore.
Dati del cambio:
| Serie di ingranaggi | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Rapporto di riduzione (K) | 6.8、10 | 20、30、 40、46 | 61,90 100.103 | 115、138、160、163、184、270、300 | 310、414、552、614 641、810、900 | 932、1243、1657 2430、2700 | ||||||
| Lunghezza del cambioL(mm) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| Coppia nominale (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Coppia istantanea (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Efficienza del cambio(%) | 81% | 73% | 65% | 59% | 53% | 48% | ||||||
Dati del cambio:
| Modello del motore | Tensione nominale | Nessun carico | Carico | Stallo | ||||||||
| Velocità | Attuale | Velocità | Attuale | Produzione | Coppia | Attuale | Coppia | |||||
| V | (giri/min) | (mA) | (giri/min) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Applicazione
Il motoriduttore Round Spur ha le caratteristiche di dimensioni ridotte, leggerezza e alta efficienza di trasmissione ed è ampiamente utilizzato in varie apparecchiature micromeccaniche. Ecco alcuni scenari applicativi comuni:
Giocattoli intelligenti: i motori a ingranaggi cilindrici CC in miniatura possono azionare varie azioni dei giocattoli intelligenti, come girare, oscillare, spingere, ecc., portando funzioni più diverse e interessanti ai giocattoli.
Robot: la miniaturizzazione e l'elevata efficienza dei motori a ingranaggi cilindrici CC miniaturizzati li rendono una parte importante del campo della robotica. Può essere utilizzato per l'attuazione dell'articolazione del robot, il movimento della mano, la camminata, ecc.
Profilo Aziendale




-

FT-37RGM3530 Motoriduttore cilindrico da 37 mm Asse al centro
-

FT-37RGM3530 Motoriduttore CC con ingranaggio cilindrico da 37 mm
-

FT-37RGM545 Coppia elevata e basso rumore, ingranaggio cilindrico da 37 mm...
-

FT-37RGM3530 Motoriduttore a ingranaggi cilindrici da 37 mm
-

FT-37RGM31ZY Motoriduttore cilindrico rotondo da 37 mm 31ZY tu...
-

FT-37RGM3540 Motoriduttore cilindrico da 37 mm 350 motore con...