





Dalam otomasi mekanis pergerakan, motor merupakan komponen yang sangat diperlukan. Dalam klasifikasi motor, motor yang paling umum dan penting adalahMotor roda gigi DCdan motor stepper. Meski sama-sama motor, namun terdapat perbedaan besar di antara keduanya. Berikut ini akan diperkenalkan perbedaan antara motor reduksi DC dan motor stepper secara detail.
Motor reduksi DC


1. Prinsip kerja
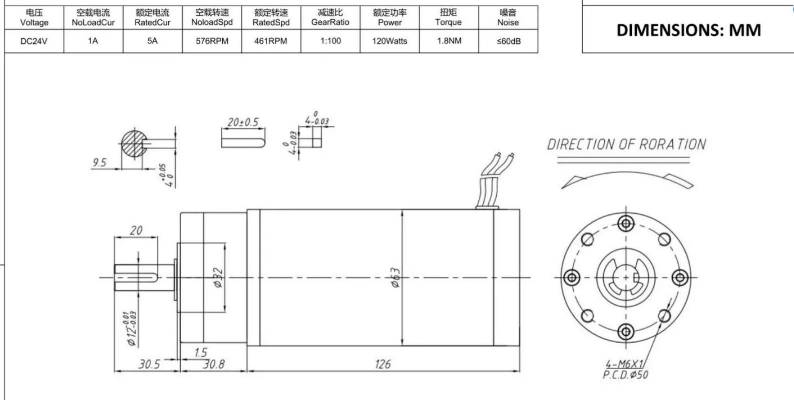
ItuMotor roda gigi DCmengubah polaritas medan magnet di dalam motor dengan arus positif dan negatif dari arus eksternal, sehingga mewujudkan putaran motor. Poros keluaran dariMotor berarah DCterintegrasi dengan peredam untuk mengurangi kecepatan putaran keluaran dan meningkatkan torsi motor untuk memastikan motor dapat beradaptasi dengan beban.
2. Fitur
ItuMotor roda gigi DC memiliki efisiensi tinggi, jangkauan kerja yang luas, dan nilai moneter yang rendah. Ini sangat cocok untuk skenario aplikasi yang memerlukan torsi tinggi, seperti beban mekanis dan sistem kontrol otomatis, namun pada saat yang sama, karena kehilangan elektromagnetiknya yang besar, pemeliharaan dan pemecahan masalah memerlukan keterampilan profesional tertentu.
motor stepper
Prinsip kerja 1.
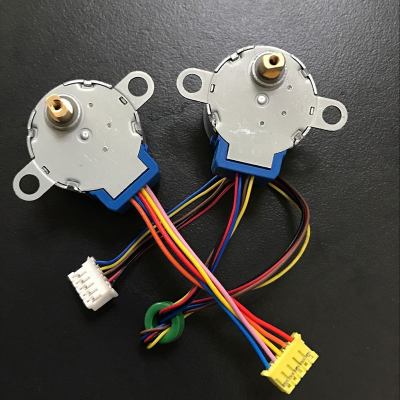
Motor stepper menggerakkan motor untuk berputar pada sudut tertentu dengan terus menerus mengubah polaritas medan elektromagnetiknya saat dihidupkan. Ini dibagi menjadi dua jenis: satu adalah motor stepper satu fase dan yang lainnya adalah motor stepper tiga fase. Poros keluaran motor stepper dipadukan dengan konverter atau peredam untuk mengontrol sudut dan kecepatan.
Fitur
Motor stepper memiliki presisi tinggi, kontrol presisi, dan dapat restart dan start secara otomatis. Mereka sangat cocok untuk skenario aplikasi dengan persyaratan kontrol presisi tinggi, seperti printer digital, pemindai laser, dan layar LCD. Namun, pada saat yang sama, karena poros penggerak motor stepper memiliki kebisingan mekanis, motor stepper bukanlah pilihan terbaik ketika diperlukan pengoperasian dengan kebisingan rendah.
Perbedaan antara motor reduksi DC dan motor stepper
| Perbedaan | Motor roda gigi DC | motor stepper |
| Prinsip kerja | Ubah polaritas medan magnet di dalam motor dengan menerapkan arus positif dan negatif
| Dengan terus menerus mengubah polaritas medan elektromagnetiknya saat dihidupkan, motor digerakkan hingga menghasilkan sudut putaran tertentu |
| Poros keluaran | Peredam terintegrasi untuk mengurangi kecepatan putaran keluaran dan meningkatkan torsi motor | Dikombinasikan dengan konverter atau peredam, dapat mengontrol sudut dan kecepatan |
| Skenario aplikasi | Cocok untuk skenario yang memerlukan torsi tinggi seperti beban mekanis dan sistem kontrol otomatis | Cocok untuk kontrol presisi tinggi dan memulai kembali skenario aplikasi yang dimulai sendiri, seperti printer digital, pemindai laser, layar LCD |
| Keuntungan | Efisiensi tinggi, jangkauan kerja luas, nilai moneter rendah | Presisi tinggi, kontrol presisi, dan restart terus menerus yang dapat dimulai sendiri |
| Kekurangan | Keausan elektromagnetik yang tinggi, memerlukan keterampilan profesional untuk pemeliharaan dan pemecahan masalah | Poros penggerak menimbulkan kebisingan mekanis |
Kesimpulan
Pendeknya,Motor roda gigi DC dan motor stepper memiliki kelebihan dan kekurangan masing-masing, dan skenario penerapannya juga berbeda. Untuk beberapa skenario yang memerlukan kontrol fleksibilitas tinggi dan presisi tinggi, seperti robot las dan CNC, umumnya digunakan kontrol motor stepper, sedangkan skenario yang memerlukan persyaratan presisi yang cepat, efisien, andal, dan tidak terlalu tinggi, seperti konveyor jalur perakitan, adalah umumnya dikendalikan oleh motor reduksi DC.
Waktu posting: 18 Oktober 2024