





20mm DC 12V 24V kaʻa hoʻokele honua i hoʻopaʻa ʻia me 180 kaʻa palaki

wikiō
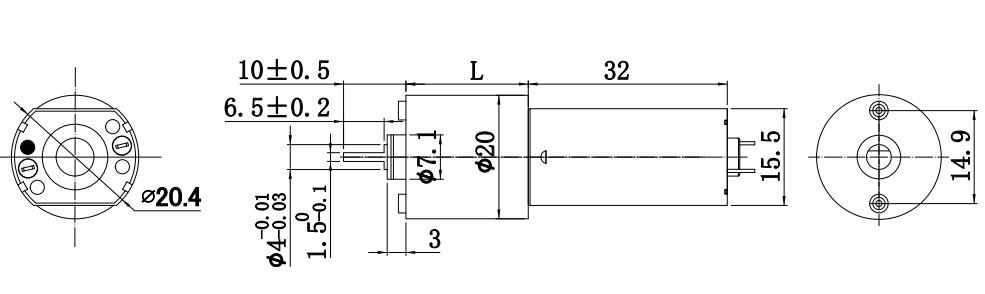
Ana (MM)
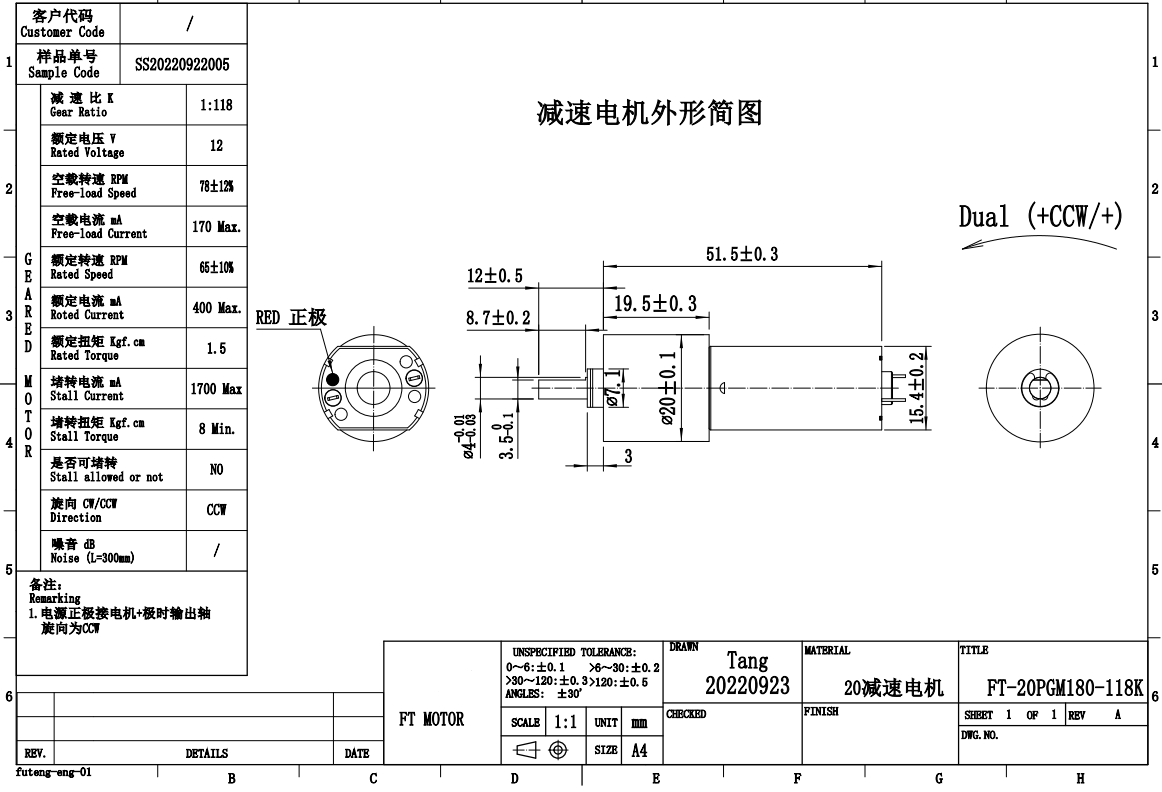
ʻO ka FT-20PGM180 kahi ʻano okaʻa hoʻokele honua. ʻO ka mea pahu pahu he plastic. Loaʻa iā ia ka hopena o ka hoʻēmi ʻana i ka walaʻau. He 20mm kona anawaena a loaʻa iā ia kahi ʻōnaehana hoʻokele honua paʻa. ʻO ka ʻōnaehana hoʻokele honua he mau ʻāpana he nui i hoʻonohonoho ʻia i loko o kahi hoʻonohonoho kikoʻī, me kahi kikowaena kikowaena (sun gear) i hoʻopuni ʻia e nā mea liʻiliʻi liʻiliʻi (planet gears) e hoʻololi a puni ia.kaʻa hoʻokele honuahoʻohana maʻamau ʻia i nā ʻoihana like ʻole a me nā noi ma muli o kona nui paʻa, kiʻekiʻe torque, a me nā mana hoʻokele pololei. Hoʻohana pinepine ʻia i nā robotics, nā lako automation, nā lāʻau lapaʻau, a me nā noi ʻē aʻe e koi ana i ka hoʻouna ʻana i ka torque kūpono a hilinaʻi hoʻi. Hāʻawi kāna ʻōnaehana planetary gear i kahi kiʻekiʻe o ka hoʻohaʻahaʻa haʻahaʻa haʻahaʻa i loko o kahi puʻupuʻu liʻiliʻi, e hopena i ka hoʻonui ʻana i ka torque a me ka hoʻomaikaʻi maikaʻi ʻana. He mea maikaʻi kēia no nā noi hana kaumaha e koi ana i ka mana pololei o ka wikiwiki a me ka torque. Eia kekahi, ʻo ka 20PGM180 planetary gear motor maʻamau ka haʻahaʻa haʻahaʻa, ʻo ia hoʻi he liʻiliʻi ka liʻiliʻi a i ʻole ka neʻe ʻana ma waena o nā pahu, e hopena i ka neʻe ʻana a pololei. He mea koʻikoʻi kēia hiʻohiʻona i nā noi e koi ana i ke kūlana kūpono, e like me nā mīkini CNC a me nā lima robotic. Hiki ke hoʻoikaikaʻia e ke au pololei (DC) a iʻole ke kaha hou (AC), ma muli o nā koi o ka noi. Ma keʻano holoʻokoʻa, ka 20PGM180kaʻa hoʻokele honuahāʻawi i kahi hopena paʻa a ikaika no nā noi ʻoihana a me nā ʻoihana like ʻole. ʻO ka hui pū ʻana o ka liʻiliʻi liʻiliʻi, ke kiʻekiʻe kiʻekiʻe, ka mana o ka neʻe ʻana, a me ka hoʻohālikelike ʻana me nā kumu mana like ʻole, he koho maʻamau ia no nā papahana ʻenekinia.
ʻIkepili pahu pahu
| Ka helu o nā mea hana | 2 | 3 | ||||||||||
| Laki Ho'emi (K) | 24 | 118、157 | ||||||||||
| Ka lōʻihi o ka pahu pahu (mm) | 16.1 | 23.7 | ||||||||||
| ʻO ka Torque i koho ʻia(kg·cm) | 0.6 | 4 | ||||||||||
| ʻO ke kuʻekuʻe wāwae (kg·cm) | 1.5 | 8 | ||||||||||
| Gearbxo Efficiency(%) | 0.73 | 0.73 | ||||||||||
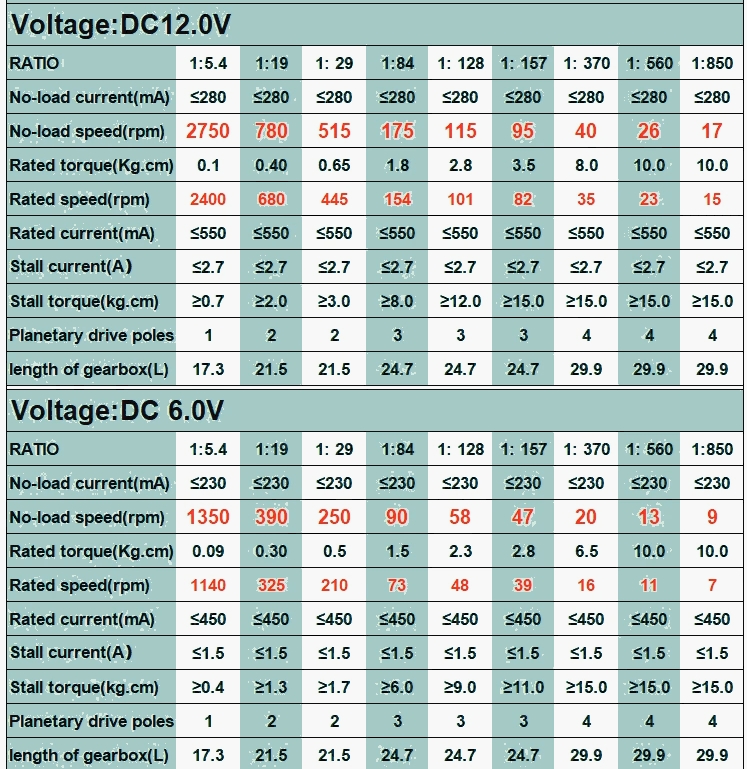
ʻIkepili Kaʻa
| Hoʻohālike kaʻa | Voltage koho | ʻAʻohe Haawe | Hoʻouka | hale kūʻai | ||||||||
| Ka māmā holo | ʻO kēia manawa | Ka māmā holo | ʻO kēia manawa | Hoʻopuka | Torque | ʻO kēia manawa | Torque | |||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-180 | 12 | 12000 | 70 | 10000 | 340 | 2.41 | 23.6 | 1700 | 140 | |||
| FT-180 | 3 | 12900 | 260 | 11000 | 1540 | 2.86 | 25.2 | 9100 | 174 | |||
| FT-180 | 24 | 10200 | 30 | 8600 | 160 | 2.52 | 25.6 | 830 | 160 | |||
| FT-180 | 5 | 5000 | 75 | 4000 | 158 | 0.8 | 19 | 790 | 85 | |||
1、ʻO nā ʻāpana kaʻa ma luna no ka ʻike, e ʻoluʻolu e nānā i ka laʻana maoli.
2、 Hiki ke hoʻopilikino ʻia nā ʻāpana kaʻa a me ka nui o ka shaft output.
3、Kumu hoʻohua = kaʻa kaʻa * ka hoʻohaʻahaʻa hoʻohaʻahaʻa * ka pono hana.
4、Ka wikiwiki o ka hoʻopuka ʻana = ka wikiwiki o ka kaʻa kaʻa.
Palapala noi
DC Gear MotorHoʻohana nui ʻia i nā lako home akamai, nā huahana holoholona akamai, nā robots, nā laka uila, nā laka kaʻa lehulehu, nā pono o kēlā me kēia lā, mīkini ATM, nā pū uila uila, nā peni paʻi 3D, nā lako keʻena, ka mālama ola kino, nā mea nani a me nā pono olakino, ʻO nā mea pāʻani, ka hao ʻōniʻoniʻo, nā lako ʻakomi kaʻa.
ʻIkepili Hui











