





FT-37RGM3530 Motor de engrenaxes cilíndricas de 37 mm Eixe no centro





Características:
Un motor de engrenaxes cilíndricas centrada refírese xeralmente a un motor no que o eixe de saída está aliñado co eixe do motor, o que significa que ambos están situados no centro da carcasa do motor.
Esta configuración permite un deseño máis compacto e unha transferencia de enerxía máis eficiente. Nesta configuración, a forza de rotación do motor transmítese directamente ao eixe de saída a través dunha serie de engrenaxes, especialmente engrenaxes rectos.
Vídeo do produto
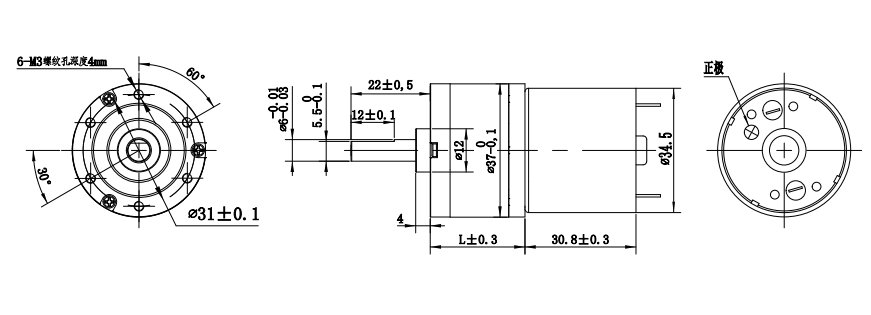
DEBUXO (MM)
Datos da caixa de cambios:
| Serie de engrenaxes | 3 | 4 | 5 | 6 | 7 | 8 | ||||||
| Relación de redución (K) | 10.6 | 24.4 | 42.7 | 74.7 | 130.8 | 228 | ||||||
| lonxitude da caixa de cambios L (mm) | 23 | 26.3 | 28.8 | 31.7 | 34.5 | 37.3 | ||||||
| Par nominal (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Par instantáneo (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Eficiencia da caixa de cambios (%) | 73 % | 65 % | 58 % | 52 % | 47 % | 42 % | ||||||
Datos do motor:
| Modelo de motor | Sen carga | Carga | Posto | |||||||||
| Tensión nominal | Velocidade | Actual | Velocidade | Actual | Saída | Torque | Actual | Torque | ||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-3530 | 12 | 3000 | 60 | 2550 | 170 | 2.04 | 20 | 460 | 200 | |||
| FT-3530 | 12 | 6000 | 70 | 4500 | 350 | 4.2 | 110 | 2300 | 440 | |||
| FT-3530 | 24 | 4500 | 40 | 3300 | 150 | 3.6 | 50 | 700 | 270 | |||
| FT-3530 | 24 | 6000 | 40 | 4500 | 200 | 4.8 | 100 | 1400 | 400 | |||
Aplicación
O motor de engrenaxe redonda ten as características de tamaño pequeno, peso lixeiro e alta eficiencia de transmisión, e é amplamente utilizado en varios equipos micromecánicos. Aquí tes algúns escenarios de aplicación comúns:
Xoguetes intelixentes: os motores de engrenaxes de CC en miniatura poden impulsar varias accións de xoguetes intelixentes, como xirar, balancear, empurrar, etc., aportando funcións máis diversas e interesantes aos xoguetes.
Robots: a miniaturización e a alta eficiencia dos motores de engrenaxes de CC en miniatura convértenos nunha parte importante do campo da robótica. Pódese usar para a actuación da articulación do robot, o movemento da man e a camiñada, etc.
Perfil da empresa




-

FT-37RGM3540 Motor de engrenaxes cilíndricas de 37 mm Motor 350 con...
-

FT-37RGM3626 PMDC 37mm Motor de engrenaxe cilíndrica 3626 BLD...
-

FT-37RGM520 12V 24V DC motor de engrenaxes 37mm m...
-

FT-37RGM500 Motores de engrenaxes cilíndricas motor robótico
-

Motorreductores de CC FT-37RGM3530-641K para autolimpieza...
-

Motor de engrenaxe recto FT-37RGM530 de 37 mm