





Yn meganyske automatisearring beweging is de motor in ûnmisbere komponint. Yn 'e klassifikaasje fan motors binne de meast foarkommende en wichtige motorsDC gear motorsen stappenmotoren. Hoewol se beide motoren binne, binne d'r grutte ferskillen tusken de twa. It folgjende sil yn detail it ferskil yntrodusearje tusken DC-reduksjemotoren en steppermotoren.
DC reduksje motor


1. Wurkprinsipe
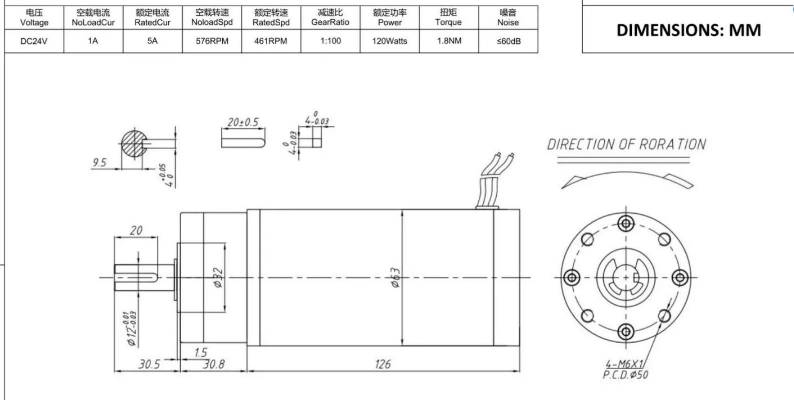
DeDC gear motorferoaret de polariteit fan it magnetyske fjild yn 'e motor troch de positive en negative stroom fan' e eksterne stroom, en realisearret dêrmei de rotaasje fan 'e motor. De útgong skacht fan deDC gear motoris yntegrearre mei in ferminderer om de útfierrotaasjesnelheid te ferminderjen en it koppel fan 'e motor te fergrutsjen om te soargjen dat de motor kin oanpasse oan' e lading.
2. Features
DeDC gear motor hat hege effisjinsje, in breed wurkjend berik, en lege monetêre wearde. It is benammen geskikt foar tapassingsscenario's dy't heech koppel nedich binne, lykas meganyske loads en automatyske kontrôlesystemen, mar tagelyk, fanwegen syn grutte elektromagnetyske ferlies, ûnderhâld en probleemoplossing fereasket bepaalde profesjonele feardigens.
Stepper motor
Wurkprinsipe 1.
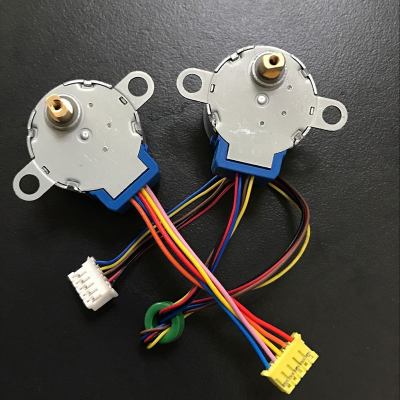
In steppermotor driuwt de motor om yn in bepaalde hoeke te draaien troch de polariteit fan har elektromagnetyske fjild kontinu te feroarjen as it wurdt oandreaun. It is ferdield yn twa soarten: ien is in ienfaze stepper motor en de oare is in trije-fase stepper motor. De útfieras fan 'e steppermotor wurdt kombinearre mei in converter as in reduksje om de hoek en snelheid te kontrolearjen.
Features
Stappenmotoren hawwe hege presyzje, krekte kontrôle, en kinne automatysk opnij starte en begjinne. Se binne benammen geskikt foar tapassingsscenario's mei easken foar hege presyzje kontrôle, lykas digitale printers, laserscanners en LCD-displays. Tagelyk, om't de oandriuwas fan 'e steppermotor meganysk lûd hat, binne steppermotoren lykwols net de bêste kar as operaasje mei lege lûden fereaske is.
It ferskil tusken DC-reduksjemotor en steppermotor
| Ferskillen | DC gear motor | Stepper motor |
| Wurkprinsipe | Feroarje de polariteit fan it magnetyske fjild yn 'e motor troch it tapassen fan positive en negative stroom
| Troch kontinu feroarjen fan de polariteit fan syn elektromagnetyske fjild as oandreaun, de motor wurdt dreaun om te produsearje in bepaalde rotaasje hoeke |
| Utfier shaft | Yntegreare reduksjer om de útfierrotaasjesnelheid te ferminderjen en it koppel fan 'e motor te ferheegjen | Kombinearre mei in converter of reduksje, kin it de hoek en snelheid kontrolearje |
| Applikaasje senario | Geskikt foar senario's dy't heech koppel nedich binne, lykas meganyske loads en automatyske kontrôlesystemen | Geskikt foar kontrôle mei hege presyzje en selsstartende applikaasjescenario's opnij starte, lykas digitale printers, laserscanners, LCD-displays |
| Foardielen | Hege effisjinsje, breed wurkberik, lege monetêre wearde | Hege presyzje, sekuere kontrôle, en trochgeande selsstartende trochstart |
| Neidielen | Hege elektromagnetyske wear, dy't profesjonele feardichheden nedich binne foar ûnderhâld en probleemoplossing | De oandriuwas hat meganyske lûd |
Konklúzje
Koartsein,DC gear motors en stepper motors hawwe harren eigen foardielen en neidielen, en harren tapassing senario binne ek oars. Foar guon senario's dy't hege fleksibiliteitskontrôle en hege presyzje fereaskje, lykas lasrobots en CNC, wurdt steppermotorkontrôle oer it algemien brûkt, wylst senario's dy't rappe, effisjinte, betroubere en net heul hege presyseasken fereaskje, lykas assemblageline-transporteurs, binne algemien regele troch DC reduksje motors.
Post tiid: Oct-18-2024