





موتور گیربکس گرد 37 میلی متری FT-37RGM31ZY 31ZY موتور لوله ای

ویژگی ها:
افزودن گیربکس به موتور DC بدون جاروبک امکان ضرب گشتاور و کاهش سرعت را فراهم می کند.

مشخصات
مشخصات فقط برای مرجع است. برای اطلاعات سفارشی با ما تماس بگیرید.
| شماره مدل | ولت نامی | بدون بار | بارگذاری کنید | غرفه | |||||
| سرعت | فعلی | سرعت | فعلی | گشتاور | قدرت | فعلی | گشتاور | ||
| دور در دقیقه | mA (حداکثر) | دور در دقیقه | mA (حداکثر) | کیلوگرم. سانتی متر | W | mA (دقیقه) | کیلوگرم. سانتی متر | ||
| FT-32RGM38500610500-13K | 6V | 807 | 1000 | 601 | 3600 | 0.91 | 5.61 | 6800 | 3.3 |
| FT-32RGM3850129000-83K | 12 ولت | 110 | 360 | 90 | 1300 | 2.7 | 2.49 | 3000 | 12 |
| FT-32RGM38502411000-61K | 24 ولت | 180 | 300 | 170 | 780 | 2 | 3.49 | 6500 | 20 |
| FT-32RGM3850247000-61K | 24 ولت | 115 | 160 | 104 | 280 | 1.5 | 1.60 | 1800 | 11.5 |
| FT-32RGM38502411000-83K | 24 ولت | 134 | 300 | 102 | 850 | 5 | 5.23 | 4000 | 23 |
| نکته: 1 کیلوگرم بر سانتی متر≈0.098 نیوتن متر≈14 اونس در 1 میلی متر≈0.039 اینچ | |||||||||
داده های گیربکس
| مرحله کاهش | 2 مرحله ای | 3 مرحله ای | 4 مرحله ای | 5 مرحله ای | 6 مرحله ای | 7 مرحله ای |
| نسبت کاهش | 6 | 13، 15 | 28، 32، 38 | 61، 71، 83، 96 | 135، 156، 182، 211، 245 | 296, 344, 400, 464, 540, 627 |
| طول گیربکس (L) میلی متر | 17.5 | 20 | 22.5 | 25 | 27.5 | 30 |
| حداکثر گشتاور نامی Kgf.cm | 2 | 2 | 2.5 | 4 | 6 | 8 |
| حداکثر گشتاور لحظه ای کیلوگرم بر سانتی متر | 3 | 3 | 4 | 6 | 10 | 12 |
| کارایی گیربکس | 81% | 73% | 65% | 59% | 53% | 48% |
داده های موتور
| مدل موتور | ولت نامی | بدون بار | بارگذاری کنید | غرفه | |||||
| فعلی | سرعت | فعلی | سرعت | گشتاور | قدرت | گشتاور | فعلی | ||
| V | mA | دور در دقیقه | mA | دور در دقیقه | gf.cm | W | gf.cm | mA | |
| FT-385 | 6 | ≤400 | 10000 | ≤2500 | 8400 | 80 | 7.04 | ≥430 | ≥8800 |
| FT-385 | 12 | ≤70 | 3000 | ≤260 | 1950 | 50 | 1.02 | ≥160 | ≥520 |
| FT-385 | 12 | ≤90 | 4500 | ≤460 | 3500 | 50 | 1.83 | ≥230 | ≥1300 |
| FT-385 | 24 | ≤80 | 3300 | ≤250 | 2750 | 74 | 2.13 | ≥290 | ≥440 |
| FT-385 | 24 | ≤120 | 7400 | ≤370 | 6400 | 60 | 4.02 | ≥420 | ≥1580 |
این ترکیب اغلب در کاربردهایی استفاده می شود که به گشتاور بالا و کنترل دقیق نیاز دارند، مانند رباتیک، اتوماسیون و وسایل نقلیه الکتریکی. انتخاب موتور گیربکس DC بدون جاروبک به گشتاور و سرعت مورد نیاز برنامه بستگی دارد. عواملی که در انتخاب موتور باید در نظر گرفته شوند عبارتند از: نسبت دنده، درجه قدرت، وزن، اندازه و ولتاژ و جریان عملیاتی.
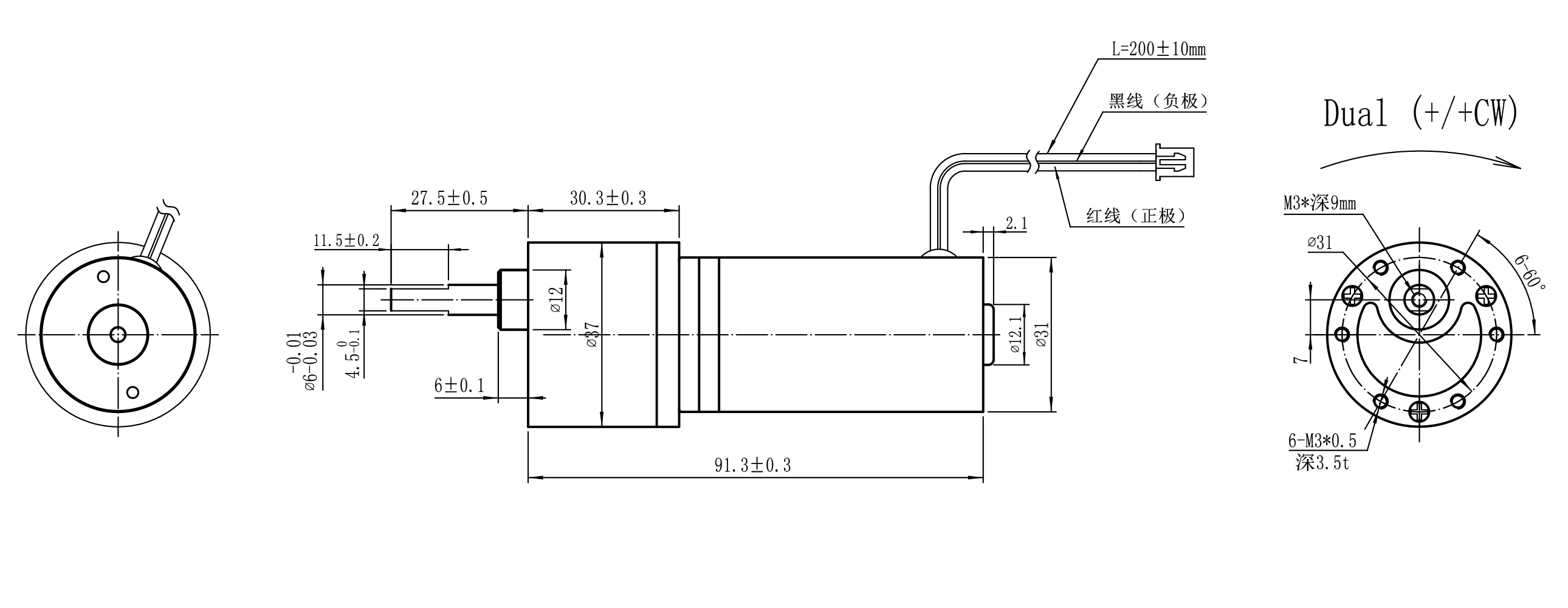
DRAWING (MM)
برنامه
موتور چرخ دنده Round Spur دارای ویژگی های اندازه کوچک، وزن سبک و راندمان انتقال بالا است و به طور گسترده در تجهیزات مختلف میکرو مکانیکی استفاده می شود. در اینجا برخی از سناریوهای کاربردی رایج وجود دارد:
اسباببازیهای هوشمند: موتورهای چرخدنده مینیاتوری DC میتوانند عملکردهای مختلف اسباببازیهای هوشمند مانند چرخش، تاب خوردن، هل دادن و غیره را هدایت کنند و عملکردهای متنوعتر و جالبتری را برای اسباببازیها به ارمغان بیاورند.
رباتها: کوچکسازی و راندمان بالای موتورهای دندهای مینیاتوری DC Spur آنها را به بخش مهمی از حوزه رباتیک تبدیل میکند. می توان از آن برای تحریک مفصل ربات، حرکت دست و راه رفتن و غیره استفاده کرد.
مشخصات شرکت














