





FT-37RGM3530 37 mm-ko engranaje motorra Ardatza erdian





Ezaugarriak:
Zentratutako engranaje-motor batek, oro har, irteera-ardatza motor-ardatzarekin lerrokatuta dagoen motor bati egiten dio erreferentzia, hau da, biak motor-karkasaren erdian kokatzen dira.
Konfigurazio honek diseinu trinkoagoa eta potentzia transferentzia eraginkorragoa ahalbidetzen du. Konfigurazio honetan, motorraren biraketa-indarra zuzenean irteteko ardatzera transmititzen da engranaje batzuen bidez, zehazki, engranaje engranajeen bidez.
Produktuen Bideoa
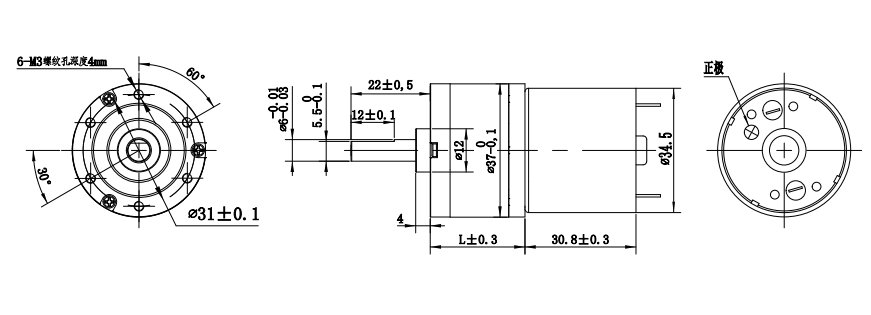
MARRAZKIA (MM)
Aldagailuen datuak:
| Engranaje seriea | 3 | 4 | 5 | 6 | 7 | 8 | ||||||
| Murrizketa ratioa (K) | 10.6 | 24.4 | 42.7 | 74.7 | 130.8 | 228 | ||||||
| Engranaje-kutxaren luzeraL (mm) | 23 | 26.3 | 28.8 | 31.7 | 34.5 | 37.3 | ||||||
| Momentu nominala (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Berehalako momentua (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Aldaketa-kutxaren eraginkortasuna (%) | %73 | %65 | %58 | %52 | %47 | %42 | ||||||
Motor datuak:
| Motor eredua | Kargarik gabe | Kargatu | Saltokia | |||||||||
| Tentsio nominala | Abiadura | Oraingoa | Abiadura | Oraingoa | Irteera | Momentua | Oraingoa | Momentua | ||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-3530 | 12 | 3000 | 60 | 2550 | 170 | 2.04 | 20 | 460 | 200 | |||
| FT-3530 | 12 | 6000 | 70 | 4500 | 350 | 4.2 | 110 | 2300 | 440 | |||
| FT-3530 | 24 | 4500 | 40 | 3300 | 150 | 3.6 | 50 | 700 | 270 | |||
| FT-3530 | 24 | 6000 | 40 | 4500 | 200 | 4.8 | 100 | 1400 | 400 | |||
Aplikazioa
Biribil-engranaje-motorrak tamaina txikia, pisu arina eta transmisio-eraginkortasun handiko ezaugarriak ditu, eta asko erabiltzen da hainbat ekipamendu mikro mekanikotan. Hona hemen ohiko aplikazio agertoki batzuk:
Jostailu adimendunak: DC miniaturazko engranaje-motorrek jostailu adimendunen hainbat ekintza gidatu ditzakete, hala nola biratu, kulunkatu, bultzatu, etab., jostailuei funtzio anitz eta interesgarriagoak ekarriz.
Robotak: DC miniaturazko engranaje motorren miniaturizazioak eta eraginkortasun handiak robotikaren arloko zati garrantzitsu bihurtzen ditu. Robot artikulazioen aktuaziorako, eskuen mugimendurako eta oinez egiteko erabil daiteke, etab.
Enpresaren profila




-

FT-37RGM3540 37mm Spur engranaje motorra 350 motorrekin ...
-

FT-37RGM3626 PMDC 37mm engranaje motorra 3626 BLD...
-

FT-37RGM520 12V 24v dc engranaje motorra 37mm engranajea m...
-

FT-37RGM500 Spur engranaje motorrak motor robotizatua
-

FT-37RGM3530-641K DC engranaje motorrak autogarbitzeko...
-

FT-37RGM530 37 mm-ko engranaje motorra