






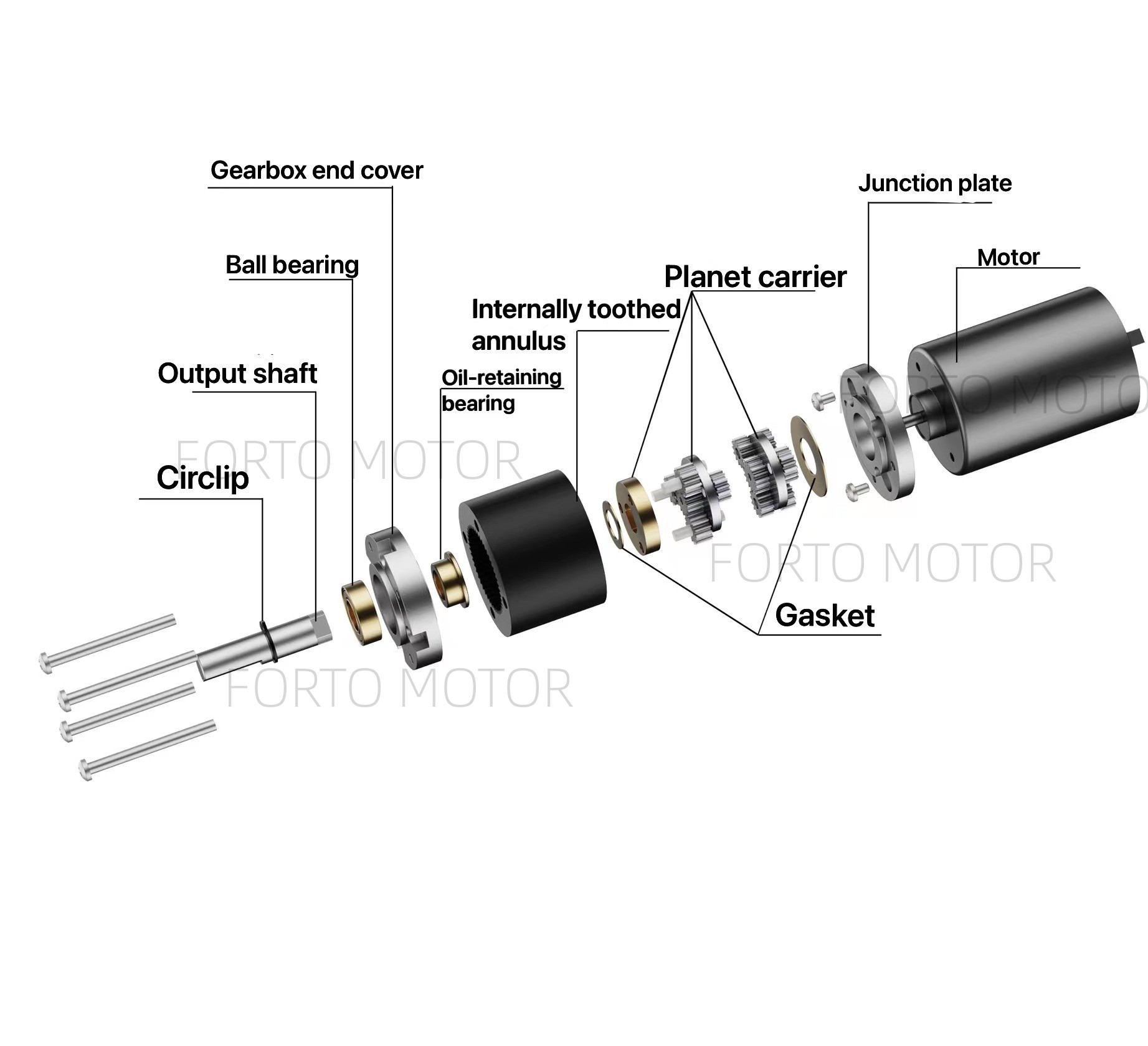
El motor reductor planetario tiene dos características. La primera es que los ejes de entrada y salida son el mismo engranaje; la segunda es que cuenta con más de 3 engranajes planetarios, lo que proporciona un mayor par resultante durante los cambios de velocidad y una velocidad más suave. Arranque (siempre tiene un buen par resultante de los engranajes).
Efecto
1) Reduzca la velocidad y aumente el par de salida al mismo tiempo. La relación de salida de par se basa en la salida del motor multiplicada por la relación de reducción, pero tenga cuidado de no exceder el par nominal del reductor.
2) La disminución de la velocidad también reduce la inercia de la carga, y la reducción de la inercia es el cuadrado de la relación de reducción. Puedes ver que generalmente los motores tienen un valor de inercia.
Tipo
Los reductores generales incluyen reductores de engranajes helicoidales, reductores planetarios de precisión, reductores planetarios servoespecíficos, reductores planetarios de ángulo recto, reductores de engranajes planetarios, reductores de engranajes helicoidales, reductores potentes, reductores de precisión y molinetes cicloides. Reductor, reductor de tornillo sin fin, transmisión mecánica continua variable de fricción planetaria, etc.
Generalmente existen tres tipos según el nivel: desaceleración de primer nivel (generalmente menor a 10:1), desaceleración de segundo nivel (generalmente mayor a 10:1 y menor o igual a 200:1) y desaceleración de tercer nivel. .
FORTO Motor tiene un motor de engranaje planetario con diámetros de 16 mm, 17 mm, 20 mm, 22 mm, 24 mm, 28 mm, 32 mm, 36 mm, 42 mm, 57 mm y otros diámetros, que se pueden combinar con motores con escobillas de CC y motores sin escobillas de CC.

Hora de publicación: 12-dic-2023