





En mekanika aŭtomatiga movado, la motoro estas nemalhavebla komponanto. En la klasifiko de motoroj, la plej oftaj kaj gravaj motoroj estasPK ilarmotorojkaj paŝomotoroj. Kvankam ili estas ambaŭ motoroj, estas grandaj diferencoj inter la du. La jenaj detale enkondukos la diferencon inter DC-reduktaj motoroj kaj paŝomotoroj.
DC-redukta motoro


1. Funkcia principo
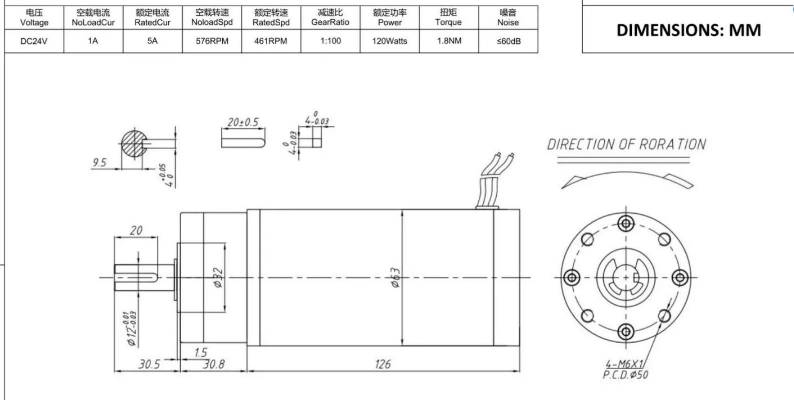
LaDc ilarmotoroŝanĝas la polusecon de la magneta kampo ene de la motoro per la pozitiva kaj negativa kurento de la ekstera kurento, tiel realigante la rotacion de la motoro. La elira ŝafto de laDc adaptita motoroestas integrita kun reduktilo por redukti la eligan rotacian rapidon kaj pliigi la tordmomanton de la motoro por certigi, ke la motoro povas adaptiĝi al la ŝarĝo.
2. Karakterizaĵoj
LaDc ilarmotoro havas altan efikecon, larĝan laboran gamon kaj malaltan monan valoron. Ĝi estas precipe taŭga por aplikaj scenaroj postulantaj altan tordmomanton, kiel mekanikaj ŝarĝoj kaj aŭtomataj kontrolsistemoj, sed samtempe, pro ĝia granda elektromagneta perdo, prizorgado kaj problemoj postulas certajn profesiajn kapablojn.
Paŝa motoro
Funkcia principo 1.
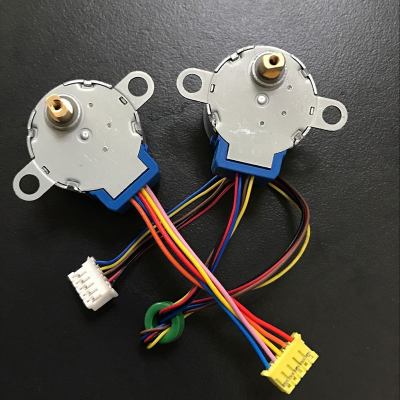
Paŝa motoro movas la motoron por rotacii laŭ certa angulo senĉese ŝanĝante la polusecon de sia elektromagneta kampo kiam ŝaltite. Ĝi estas dividita en du tipojn: unu estas unufaza paŝa motoro kaj la alia estas trifaza paŝa motoro. La eliga ŝafto de la paŝomotoro estas kombinita kun konvertilo aŭ reduktilo por kontroli la angulon kaj rapidon.
Trajtoj
Paŝomotoroj havas altan precizecon, precizan kontrolon, kaj povas rekomenci kaj komenci aŭtomate. Ili estas precipe taŭgaj por aplikaj scenaroj kun altprecizecaj kontrolpostuloj, kiel ekzemple ciferecaj presiloj, laseraj skaniloj kaj LCD-ekranoj. Tamen, samtempe, ĉar la paŝmotora stirado de ŝafto havas mekanikan bruon, paŝmotoroj ne estas la plej bona elekto kiam malalta brua operacio estas postulata.
La diferenco inter DC-redukta motoro kaj paŝomotoro
| Diferencoj | Dc ilarmotoro | Paŝa motoro |
| Funkcia principo | Ŝanĝu la polusecon de la magneta kampo ene de la motoro aplikante pozitivan kaj negativan kurenton
| Senĉese ŝanĝante la polusecon de ĝia elektromagneta kampo kiam ŝaltita, la motoro estas movita por produkti certan rotacian angulon. |
| Eliga ŝafto | Integrita reduktilo por redukti la eligan rotacian rapidon kaj pliigi la tordmomanton de la motoro | Kombinita kun konvertilo aŭ reduktilo, ĝi povas kontroli la angulon kaj rapidecon |
| Aplikaj scenaroj | Taŭga por scenaroj postulantaj altan tordmomanton kiel mekanikaj ŝarĝoj kaj aŭtomataj kontrolsistemoj | Taŭga por altpreciza kontrolo kaj rekomenco de mem-komencaj aplikaĵscenaroj, kiel ciferecaj presiloj, laseraj skaniloj, LCD-ekranoj. |
| Avantaĝoj | Alta efikeco, larĝa laborgamo, malalta mona valoro | Alta precizeco, preciza kontrolo kaj kontinua rekomenco mem-komenca |
| Malavantaĝoj | Alta elektromagneta eluziĝo, postulanta profesiajn kapablojn por prizorgado kaj solvo de problemoj | La veturadŝakto havas mekanikan bruon |
Konkludo
Resume,PK ilarmotoroj kaj paŝomotoroj havas siajn proprajn avantaĝojn kaj malavantaĝojn, kaj iliaj aplikaj scenaroj ankaŭ estas malsamaj. Por iuj scenaroj, kiuj postulas altan flekseblecon kaj altan precizecon, kiel veldantajn robotojn kaj CNC, oni ĝenerale uzas paŝomotoran kontrolon, dum scenaroj, kiuj postulas rapidajn, efikajn, fidindajn kaj ne tre altajn precizecajn postulojn, kiel muntaĵliniaj transportiloj, estas. ĝenerale kontrolite per DC-reduktmotoroj.
Afiŝtempo: Oct-18-2024