





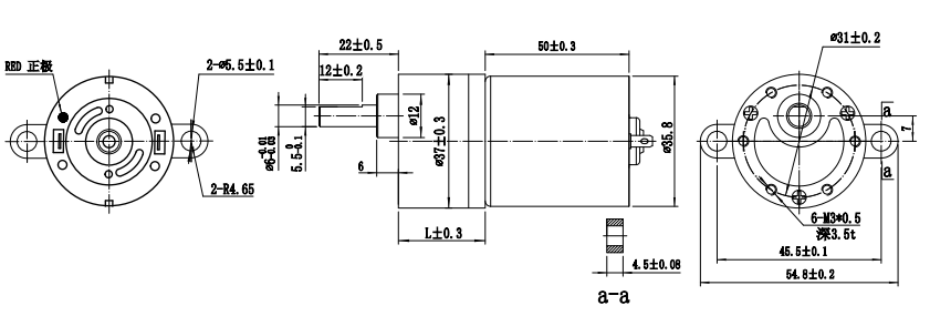
FT-37RGM545 Κινητήρας Round Spur με μειωτήρα ταχυτήτων







Χαρακτηριστικά:
Στη Forto, δεσμευόμαστε να παρέχουμε λύσεις υψηλής ποιότητας που υπερβαίνουν τις προσδοκίες των πελατών μας. Τα κυκλικά κιβώτια ταχυτήτων 37 mm συνδυάζουν τεχνολογία αιχμής, αξιοπιστία και ευελιξία για να παρέχουν την ιδανική λύση για τις εφαρμογές κίνησης κινητήρα σας.
Δεδομένα κιβωτίου ταχυτήτων:
| Σειρά εργαλείων | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Αναλογία μείωσης (K) | 6.8, 10 | 20, 30, 40, 46 | 61, 90 100,103 | 115, 138, 160, 163, 184, 270, 300 | 310, 414, 552, 614 641, 810, 900 | 932, 1243, 1657 2430, 2700 | ||||||
| Μήκος κιβωτίου ταχυτήτων L(mm) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| Ονομαστική ροπή (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Στιγμιαία ροπή (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Απόδοση κιβωτίου ταχυτήτων (%) | 81% | 73% | 65% | 59% | 53% | 48% | ||||||
Δεδομένα κιβωτίου ταχυτήτων:
| Μοντέλο κινητήρα | Ονομαστική τάση | Χωρίς Φορτίο | Φορτίο | Αναβάλλω | ||||||||
| Ταχύτητα | Ρεύμα | Ταχύτητα | Ρεύμα | Παραγωγή | Ροπή | Ρεύμα | Ροπή | |||||
| V | (σ.α.λ.) | (mA) | (σ.α.λ.) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Εφαρμογή
Ο κινητήρας γραναζιών Round Spur έχει τα χαρακτηριστικά του μικρού μεγέθους, του μικρού βάρους και της υψηλής απόδοσης μετάδοσης και χρησιμοποιείται ευρέως σε διάφορους μικρομηχανολογικούς εξοπλισμούς. Ακολουθούν ορισμένα κοινά σενάρια εφαρμογής:
Έξυπνα παιχνίδια: Οι μικροσκοπικοί κινητήρες με γρανάζια DC μπορούν να οδηγήσουν διάφορες ενέργειες έξυπνων παιχνιδιών, όπως στροφή, αιώρηση, ώθηση κ.λπ., φέρνοντας πιο διαφορετικές και ενδιαφέρουσες λειτουργίες στα παιχνίδια.
Ρομπότ: Η μικρογραφία και η υψηλή απόδοση των μικροσκοπικών κινητήρων DC spur τους καθιστούν σημαντικό μέρος του τομέα της ρομποτικής. Μπορεί να χρησιμοποιηθεί για ενεργοποίηση αρθρώσεων ρομπότ, κίνηση χεριών και περπάτημα κ.λπ.
Εταιρικό Προφίλ




-

FT-37RGM3530 Κινητήρας 37mm Spur Άξονας στο κέντρο
-

FT-37RGM3530 κιβώτιο ταχυτήτων 37 mm Κιβώτιο ταχυτήτων DC spur
-

FT-37RGM545 Υψηλή ροπή χαμηλού θορύβου 37mm Spur gea...
-

FT-37RGM3530 Κινητήρας Spur 37mm
-

FT-37RGM31ZY 37mm στρογγυλό μειωτήρα στροφών 31ZY tu...
-

FT-37RGM3540 37mm Spur γρανάζι κινητήρα 350 κινητήρα με...