





Bei mechanischen Automatisierungsbewegungen ist der Motor eine unverzichtbare Komponente. Bei der Klassifizierung der Motoren handelt es sich um die häufigsten und wichtigsten MotorenGleichstrom-Getriebemotorenund Schrittmotoren. Obwohl es sich bei beiden um Motoren handelt, gibt es große Unterschiede zwischen den beiden. Im Folgenden wird der Unterschied zwischen Gleichstrom-Untersetzungsmotoren und Schrittmotoren im Detail vorgestellt.
DC-Untersetzungsmotor


1. Funktionsprinzip
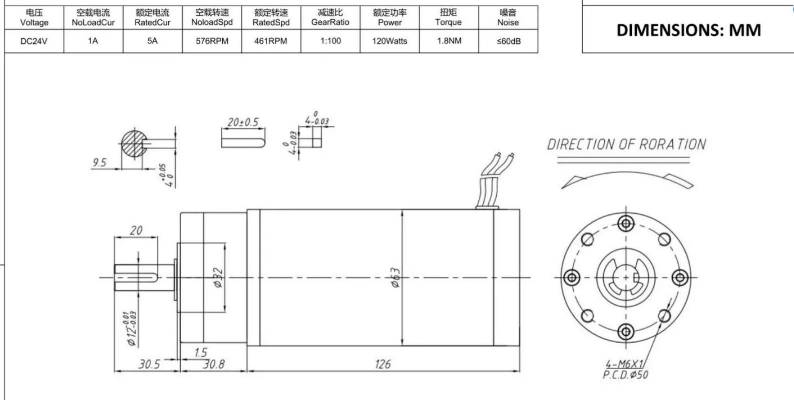
DerGleichstromgetriebemotorändert die Polarität des Magnetfelds im Inneren des Motors durch den positiven und negativen Strom des externen Stroms und realisiert so die Drehung des Motors. Die Abtriebswelle desGleichstrom-Getriebemotorist mit einem Untersetzungsgetriebe ausgestattet, um die Ausgangsdrehzahl zu reduzieren und das Drehmoment des Motors zu erhöhen, um sicherzustellen, dass sich der Motor an die Last anpassen kann.
2. Funktionen
DerGleichstromgetriebemotor hat eine hohe Effizienz, einen großen Arbeitsbereich und einen geringen Geldwert. Es eignet sich besonders für Anwendungsszenarien, die ein hohes Drehmoment erfordern, wie z. B. mechanische Belastungen und automatische Steuerungssysteme. Gleichzeitig erfordern Wartung und Fehlerbehebung aufgrund des großen elektromagnetischen Verlusts jedoch bestimmte Fachkenntnisse.
Schrittmotor
Funktionsprinzip 1.
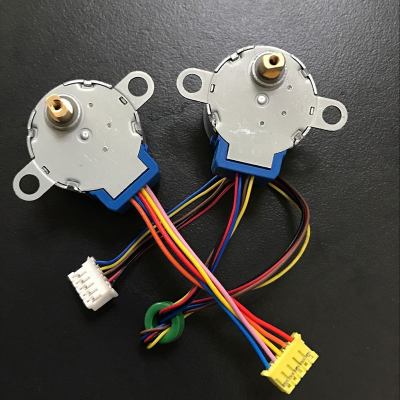
Ein Schrittmotor treibt den Motor an, sich in einem bestimmten Winkel zu drehen, indem er beim Einschalten kontinuierlich die Polarität seines elektromagnetischen Feldes ändert. Es gibt zwei Typen: Der eine ist ein einphasiger Schrittmotor und der andere ist ein dreiphasiger Schrittmotor. Die Abtriebswelle des Schrittmotors ist mit einem Konverter oder einem Untersetzungsgetriebe kombiniert, um Winkel und Geschwindigkeit zu steuern.
Merkmale
Schrittmotoren verfügen über eine hohe Präzision, eine präzise Steuerung und können automatisch neu starten und starten. Sie eignen sich besonders für Anwendungsszenarien mit hochpräzisen Steuerungsanforderungen, wie zum Beispiel Digitaldrucker, Laserscanner und LCD-Displays. Da die Antriebswelle des Schrittmotors jedoch mechanische Geräusche verursacht, sind Schrittmotoren nicht die beste Wahl, wenn ein geräuscharmer Betrieb erforderlich ist.
Der Unterschied zwischen Gleichstrom-Untersetzungsmotor und Schrittmotor
| Unterschiede | Gleichstromgetriebemotor | Schrittmotor |
| Funktionsprinzip | Ändern Sie die Polarität des Magnetfelds im Motor, indem Sie positiven und negativen Strom anlegen
| Durch kontinuierliche Änderung der Polarität seines elektromagnetischen Feldes beim Einschalten wird der Motor angetrieben, um einen bestimmten Drehwinkel zu erzeugen |
| Abtriebswelle | Integriertes Untersetzungsgetriebe zur Reduzierung der Ausgangsdrehzahl und Erhöhung des Drehmoments des Motors | In Kombination mit einem Konverter oder Untersetzungsgetriebe können Winkel und Geschwindigkeit gesteuert werden |
| Anwendungsszenarien | Geeignet für Szenarien, die ein hohes Drehmoment erfordern, wie z. B. mechanische Belastungen und automatische Steuerungssysteme | Geeignet für hochpräzise Steuerungs- und Neustart-Selbststart-Anwendungsszenarien, wie z. B. Digitaldrucker, Laserscanner, LCD-Displays |
| Vorteile | Hohe Effizienz, großer Arbeitsbereich, geringer Geldwert | Hohe Präzision, präzise Steuerung und kontinuierlicher Selbststart |
| Nachteile | Hoher elektromagnetischer Verschleiß, der professionelle Fähigkeiten für Wartung und Fehlerbehebung erfordert | Die Antriebswelle macht mechanische Geräusche |
Abschluss
Zusamenfassend,Gleichstrom-Getriebemotoren und Schrittmotoren haben ihre eigenen Vor- und Nachteile und auch ihre Einsatzszenarien sind unterschiedlich. Für einige Szenarien, die eine Steuerung mit hoher Flexibilität und hoher Präzision erfordern, wie z. B. Schweißroboter und CNC, wird im Allgemeinen eine Schrittmotorsteuerung verwendet, während für Szenarien, die schnelle, effiziente, zuverlässige und nicht sehr hohe Präzisionsanforderungen erfordern, wie z. B. Fließbandförderer, dies der Fall ist im Allgemeinen durch Gleichstrom-Untersetzungsmotoren gesteuert.
Zeitpunkt der Veröffentlichung: 18. Okt. 2024