





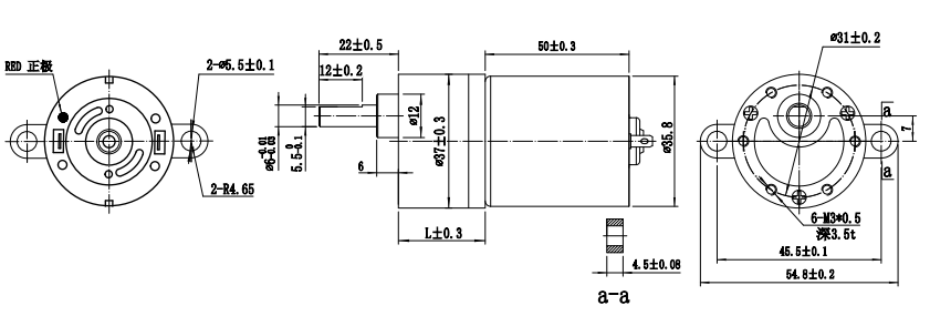
FT-37RGM545 Runder Stirnradgetriebemotor mit Untersetzung







Merkmale:
Bei Forto sind wir bestrebt, qualitativ hochwertige Lösungen bereitzustellen, die die Erwartungen unserer Kunden übertreffen. Unsere 37-mm-Rundstirnradgetriebe kombinieren modernste Technologie, Zuverlässigkeit und Vielseitigkeit und bieten die ideale Lösung für Ihre Motorantriebsanwendungen.
Getriebedaten:
| Getriebeserie | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Untersetzungsverhältnis (K) | 6.8、10 | 20、30、 40、46 | 61、90 100.103 | 115, 138, 160, 163, 184, 270, 300 | 310、414、552、614 641、810、900 | 932、1243、1657 2430、2700 | ||||||
| GetriebelängeL(mm) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| Nenndrehmoment (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Sofortiges Drehmoment (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Getriebewirkungsgrad (%) | 81 % | 73 % | 65 % | 59 % | 53 % | 48 % | ||||||
Getriebedaten:
| Motormodell | Nennspannung | Keine Ladung | Laden | Stall | ||||||||
| Geschwindigkeit | Aktuell | Geschwindigkeit | Aktuell | Ausgabe | Drehmoment | Aktuell | Drehmoment | |||||
| V | (U/min) | (mA) | (U/min) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Anwendung
Der runde Stirnradgetriebemotor zeichnet sich durch geringe Größe, geringes Gewicht und hohe Übertragungseffizienz aus und wird häufig in verschiedenen mikromechanischen Geräten eingesetzt. Hier sind einige häufige Anwendungsszenarien:
Intelligente Spielzeuge: Miniatur-Gleichstrom-Stirnradgetriebemotoren können verschiedene Aktionen von intelligenten Spielzeugen wie Drehen, Schwingen, Schieben usw. antreiben und so den Spielzeugen vielfältigere und interessantere Funktionen verleihen.
Roboter: Die Miniaturisierung und der hohe Wirkungsgrad von Miniatur-Gleichstrom-Stirnradgetriebemotoren machen sie zu einem wichtigen Bestandteil der Robotik. Es kann für die Betätigung von Robotergelenken, Handbewegungen und Gehen usw. verwendet werden.
Unternehmensprofil




-

FT-37RGM3530 37-mm-Stirnradgetriebemotor. Achse in der Mitte
-

FT-37RGM3530 37-mm-Getriebe-Gleichstrom-Stirnradgetriebemotor
-

FT-37RGM545 Hohes Drehmoment, geräuscharm, 37 mm Stirnradgetriebe ...
-

FT-37RGM3530 37-mm-Stirnradgetriebemotor
-

FT-37RGM31ZY 37mm runder Stirnradgetriebemotor 31ZY ...
-

FT-37RGM3540 37mm Stirnradgetriebemotor 350 Motor mit ...