





I mekanisk automatiseringsbevægelse er motoren en uundværlig komponent. I klassificeringen af motorer er de mest almindelige og vigtige motorerDC gearmotorerog stepmotorer. Selvom de begge er motorer, er der store forskelle mellem de to. Det følgende vil introducere forskellen mellem DC-reduktionsmotorer og stepmotorer i detaljer.
DC reduktionsmotor


1. Arbejdsprincip
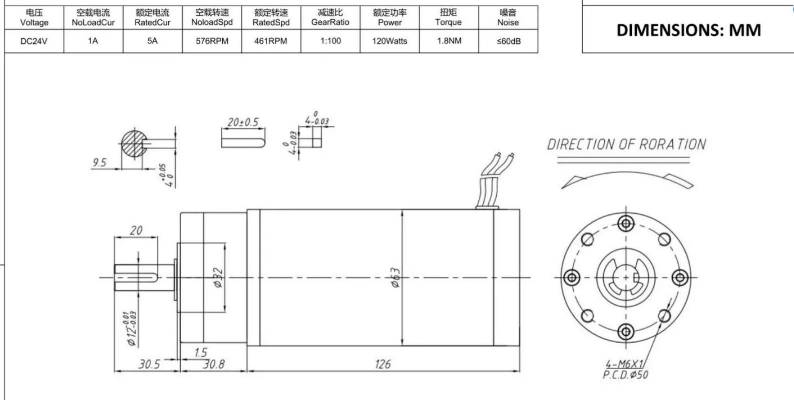
DeDC gearmotorændrer polariteten af magnetfeltet inde i motoren med den positive og negative strøm af den eksterne strøm, hvorved motorens rotation realiseres. Udgangsakslen påDC gearmotorer integreret med en reducer for at reducere udgangsrotationshastigheden og øge motorens drejningsmoment for at sikre, at motoren kan tilpasse sig belastningen.
2. Funktioner
DeDC gearmotor har høj effektivitet, et bredt arbejdsområde og lav pengeværdi. Det er særligt velegnet til anvendelsesscenarier, der kræver højt drejningsmoment, såsom mekaniske belastninger og automatiske styresystemer, men på samme tid kræver vedligeholdelse og fejlfinding på grund af dets store elektromagnetiske tab visse faglige færdigheder.
Stepmotor
Arbejdsprincip 1.
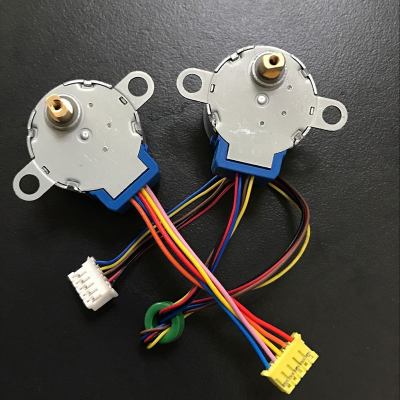
En stepmotor driver motoren til at rotere i en bestemt vinkel ved løbende at ændre polariteten af dens elektromagnetiske felt, når den er tændt. Den er opdelt i to typer: den ene er en enfaset stepmotor og den anden er en trefaset stepmotor. Udgangsakslen på stepmotoren er kombineret med en omformer eller en reducer for at styre vinklen og hastigheden.
Funktioner
Stepmotorer har høj præcision, præcis kontrol og kan genstarte og starte automatisk. De er særligt velegnede til anvendelsesscenarier med højpræcisionskontrolkrav, såsom digitale printere, laserscannere og LCD-skærme. Men på samme tid, da stepmotorens drivaksel har mekanisk støj, er stepmotorer ikke det bedste valg, når støjsvag drift er påkrævet.
Forskellen mellem DC-reduktionsmotor og stepmotor
| Forskelle | DC gearmotor | Stepmotor |
| Arbejdsprincip | Skift polariteten af det magnetiske felt inde i motoren ved at anvende positiv og negativ strøm
| Ved kontinuerligt at ændre polariteten af dets elektromagnetiske felt, når den tændes, drives motoren til at producere en bestemt rotationsvinkel |
| Udgangsaksel | Integreret reducer for at reducere udgangsrotationshastigheden og øge motorens drejningsmoment | Kombineret med en omformer eller reducer kan den styre vinklen og hastigheden |
| Applikationsscenarier | Velegnet til scenarier, der kræver højt drejningsmoment, såsom mekaniske belastninger og automatiske styresystemer | Velegnet til højpræcisionskontrol og genstart selvstartende applikationsscenarier, såsom digitale printere, laserscannere, LCD-skærme |
| Fordele | Høj effektivitet, bredt arbejdsområde, lav pengeværdi | Høj præcision, præcis kontrol og kontinuerlig genstart selvstart |
| Ulemper | Højt elektromagnetisk slid, der kræver faglige færdigheder til vedligeholdelse og fejlfinding | Drivakslen har mekanisk støj |
Konklusion
Kort sagt,DC gearmotorer og stepmotorer har deres egne fordele og ulemper, og deres anvendelsesscenarier er også forskellige. Til nogle scenarier, der kræver høj fleksibilitetskontrol og høj præcision, såsom svejserobotter og CNC, bruges stepmotorstyring generelt, mens scenarier, der kræver hurtige, effektive, pålidelige og ikke særlig høje præcisionskrav, såsom samlebåndstransportører, er generelt styret af DC-reduktionsmotorer.
Indlægstid: 18. oktober 2024