





Mewn symudiad awtomeiddio mecanyddol, mae'r modur yn elfen anhepgor. Yn y dosbarthiad o moduron, mae'r moduron mwyaf cyffredin a phwysigMotors gêr DCa moduron stepper. Er eu bod yn ddau fodur, mae gwahaniaethau mawr rhwng y ddau. Bydd y canlynol yn cyflwyno'r gwahaniaeth rhwng moduron lleihau DC a moduron stepiwr yn fanwl.
Modur lleihau DC


1. Egwyddor gweithio
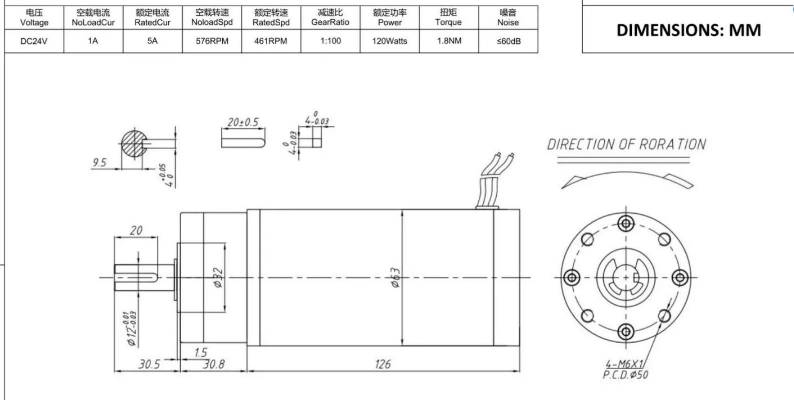
Mae'rModur gêr DCyn newid polaredd y maes magnetig y tu mewn i'r modur gan gerrynt positif a negyddol y cerrynt allanol, a thrwy hynny wireddu cylchdroi'r modur. Mae siafft allbwn yModur wedi'i anelu at DCwedi'i integreiddio â lleihäwr i leihau'r cyflymder cylchdroi allbwn a chynyddu torque y modur i sicrhau bod y modur yn gallu addasu i'r llwyth.
2. Nodweddion
Mae'rModur gêr DC mae ganddo effeithlonrwydd uchel, ystod waith eang, a gwerth ariannol isel. Mae'n arbennig o addas ar gyfer senarios cais sy'n gofyn am trorym uchel, megis llwythi mecanyddol a systemau rheoli awtomatig, ond ar yr un pryd, oherwydd ei golled electromagnetig mawr, mae angen sgiliau proffesiynol penodol ar gyfer cynnal a chadw a datrys problemau.
Modur stepper
Egwyddor gweithio 1.
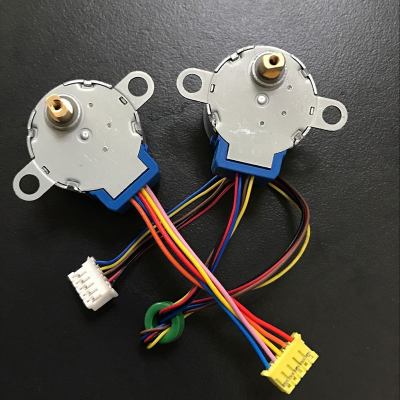
Mae modur stepper yn gyrru'r modur i gylchdroi ar ongl benodol trwy newid polaredd ei faes electromagnetig yn barhaus pan gaiff ei bweru ymlaen. Mae wedi'i rannu'n ddau fath: mae un yn fodur stepiwr un cam a'r llall yn fodur stepper tri cham. Mae siafft allbwn y modur stepiwr wedi'i gyfuno â thrawsnewidydd neu leihäwr i reoli'r ongl a'r cyflymder.
Nodweddion
Mae gan moduron stepper drachywiredd uchel, rheolaeth fanwl gywir, a gallant ailgychwyn a chychwyn yn awtomatig. Maent yn arbennig o addas ar gyfer senarios cais gyda gofynion rheoli manwl uchel, megis argraffwyr digidol, sganwyr laser, ac arddangosfeydd LCD. Fodd bynnag, ar yr un pryd, gan fod gan siafft yrru modur stepper sŵn mecanyddol, nid moduron stepiwr yw'r dewis gorau pan fo angen gweithrediad sŵn isel.
Y gwahaniaeth rhwng modur lleihau DC a modur stepper
| Gwahaniaethau | Modur gêr DC | Modur stepper |
| Egwyddor gweithio | Newid polaredd y maes magnetig y tu mewn i'r modur trwy gymhwyso cerrynt positif a negyddol
| Trwy newid polaredd ei faes electromagnetig yn barhaus pan gaiff ei bweru ymlaen, mae'r modur yn cael ei yrru i gynhyrchu ongl gylchdroi benodol |
| Siafft allbwn | Lleihäwr integredig i leihau'r cyflymder cylchdroi allbwn a chynyddu trorym y modur | Wedi'i gyfuno â thrawsnewidydd neu leihäwr, gall reoli'r ongl a'r cyflymder |
| Senarios cais | Yn addas ar gyfer senarios sydd angen torque uchel fel llwythi mecanyddol a systemau rheoli awtomatig | Yn addas ar gyfer rheoli manwl uchel ac ailgychwyn senarios cais hunan-gychwyn, megis argraffwyr digidol, sganwyr laser, arddangosfeydd LCD |
| Manteision | Effeithlonrwydd uchel, ystod waith eang, gwerth ariannol isel | Cywirdeb uchel, rheolaeth fanwl gywir, ac ailgychwyn parhaus hunan-gychwyn |
| Anfanteision | Gwisgo electromagnetig uchel, sy'n gofyn am sgiliau proffesiynol ar gyfer cynnal a chadw a datrys problemau | Mae gan y siafft yrru sŵn mecanyddol |
Casgliad
Yn fyr,Motors gêr DC ac mae gan moduron stepiwr eu manteision a'u hanfanteision eu hunain, ac mae eu senarios cymhwyso hefyd yn wahanol. Ar gyfer rhai senarios sydd angen rheolaeth hyblygrwydd uchel a manwl gywirdeb uchel, megis robotiaid weldio a CNC, defnyddir rheolaeth modur stepper yn gyffredinol, tra bod senarios sy'n gofyn am ofynion manwl cyflym, effeithlon, dibynadwy ac nid uchel iawn, megis cludwyr llinell cydosod, yn a reolir yn gyffredinol gan moduron lleihau DC.
Amser postio: Hydref-18-2024