





FT-37RGM3530 37mm motor s čelním ozubením Osa uprostřed





Vlastnosti:
Motor s čelním ozubeným kolem se středem obecně označuje motor, u kterého je výstupní hřídel zarovnána s hřídelí motoru, což znamená, že jsou oba umístěny ve středu skříně motoru.
Tato konfigurace umožňuje kompaktnější design a efektivnější přenos energie. V tomto nastavení je rotační síla motoru přenášena přímo na výstupní hřídel prostřednictvím řady ozubených kol, konkrétně čelních ozubených kol
Video o produktu
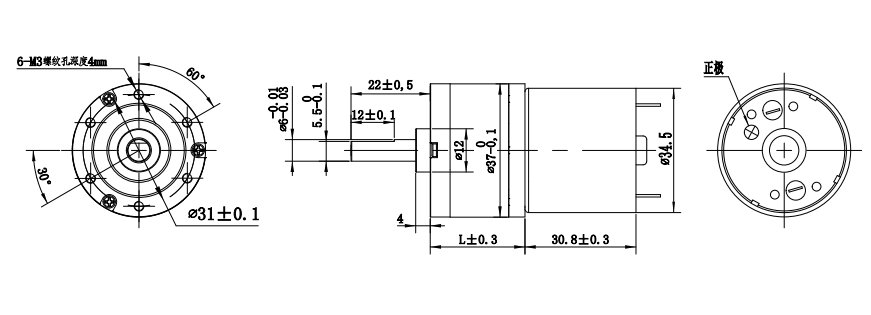
VÝKRES (MM)
Údaje o převodovce:
| Série ozubených kol | 3 | 4 | 5 | 6 | 7 | 8 | ||||||
| Redukční poměr(K) | 10.6 | 24.4 | 42.7 | 74,7 | 130,8 | 228 | ||||||
| Délka převodovky L (mm) | 23 | 26.3 | 28.8 | 31.7 | 34.5 | 37.3 | ||||||
| Jmenovitý točivý moment(kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Okamžitý točivý moment(kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Účinnost převodovky(%) | 73 % | 65 % | 58 % | 52 % | 47 % | 42 % | ||||||
Údaje o motoru:
| Model motoru | Žádné zatížení | Zatížení | Stánek | |||||||||
| Jmenovité napětí | Rychlost | Proud | Rychlost | Proud | Výstup | Točivý moment | Proud | Točivý moment | ||||
| V | (ot/min) | (mA) | (ot/min) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-3530 | 12 | 3000 | 60 | 2550 | 170 | 2.04 | 20 | 460 | 200 | |||
| FT-3530 | 12 | 6000 | 70 | 4500 | 350 | 4.2 | 110 | 2300 | 440 | |||
| FT-3530 | 24 | 4500 | 40 | 3300 | 150 | 3.6 | 50 | 700 | 270 | |||
| FT-3530 | 24 | 6000 | 40 | 4500 | 200 | 4.8 | 100 | 1400 | 400 | |||
Aplikace
Kulatý převodový motor má vlastnosti malé velikosti, nízké hmotnosti a vysoké účinnosti přenosu a je široce používán v různých mikromechanických zařízeních. Zde jsou některé běžné scénáře aplikací:
Chytré hračky: Miniaturní stejnosměrné motory s čelním ozubením mohou pohánět různé činnosti chytrých hraček, jako je otáčení, houpání, tlačení atd., čímž přinášejí hračkám rozmanitější a zajímavější funkce.
Roboti: Miniaturizace a vysoká účinnost miniaturních stejnosměrných motorů s čelním ozubením z nich činí důležitou součást oblasti robotiky. Může být použit pro ovládání kloubu robota, pohyb rukou a chůzi atd.
Profil společnosti




-

FT-37RGM3540 37mm motor s čelní převodovkou 350 motor s...
-

FT-37RGM3626 PMDC 37mm motor s čelním ozubením 3626 BLD...
-

FT-37RGM520 12V 24V DC převodový motor 37mm převodový m...
-

Robotický motor FT-37RGM500 Motor s čelním ozubením
-

DC převodové motory FT-37RGM3530-641K pro samočištění...
-

FT-37RGM530 37mm motor s čelním ozubením