





FT-37RGM545 Motore d'ingranaggio Round Spur cù riduzzione di ingranaggi







Features:
In Forto, simu impegnati à furnisce suluzioni di alta qualità chì superanu l'aspettattivi di i nostri clienti. I nostri ingranaggi cilindrici circulari da 37 mm combinanu tecnulugia di punta, affidabilità è versatilità per furnisce a soluzione ideale per e vostre applicazioni di azionamentu di u mutore.
Dati Gearbox:
| Serie di ingranaggi | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Rapportu di riduzzione (K) | 6.8, 10 | 20, 30, 40, 46 | 61, 90 100.103 | 115、138、160、163、184、270、300 | 310、414、552、614 641, 810, 900 | 932, 1243, 1657 2430, 2700 | ||||||
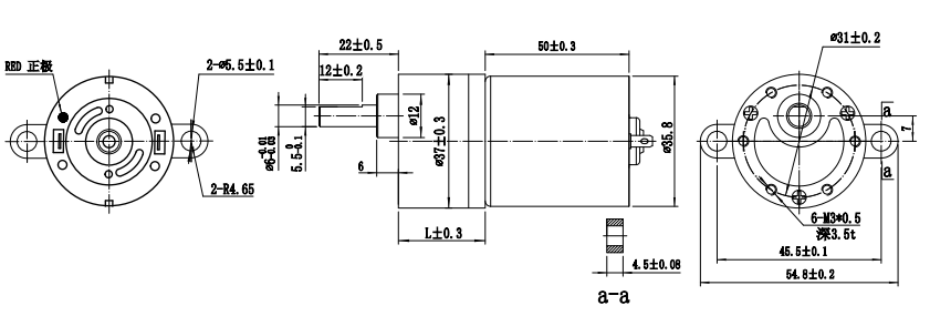
| Longueur du réducteur L (mm) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| Coppia nominale (kg·cm) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Torque istantaneo (kg·cm) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Efficienza di a scatula di trasmissione (%) | 81% | 73% | 65% | 59% | 53% | 48% | ||||||
Dati Gearbox:
| Mudellu di Motore | Tensione nominale | Nisuna carica | Carica | Stalla | ||||||||
| Velocità | currente | Velocità | currente | Output | Torque | currente | Torque | |||||
| V | (rpm) | (mA) | (rpm) | (mA) | (w) | (g·cm) | (mA) | (g·cm) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Applicazione
U mutore di ingranaggi Round Spur hà e caratteristiche di piccula dimensione, pesu ligeru è alta efficienza di trasmissione, è hè largamente utilizatu in diversi equipaghji micro meccanichi. Eccu alcuni scenarii d'applicazione cumuni:
Giocattoli intelligenti: I motori di ingranaggi DC in miniatura ponu guidà diverse azioni di ghjoculi intelligenti, cum'è a rotazione, oscillazione, spinta, etc., purtendu funzioni più diverse è interessanti à i ghjoculi.
Robots: A miniaturizazione è l'alta efficienza di i motori in miniatura DC spur gear li facenu una parte impurtante di u campu di a robotica. Pò esse usatu per l'attuazione di l'articulazione di u robot, u muvimentu di a manu è a caminata, etc.
Profilu di a cumpagnia




-

FT-37RGM3530 37mm Spur Gear Motor Axis in centru
-

FT-37RGM3530 Scatola di ingranaggi da 37 mm Motore di ingranaggi cilindrici DC
-

FT-37RGM545 Coppia elevata a basso rumore 37 mm Ingranaggi cilindrici ...
-

FT-37RGM3530 Motore à ingranaggi cilindrici da 37 mm
-

FT-37RGM31ZY Motoriduttore cilindrico tondo da 37 mm 31ZY tu...
-

FT-37RGM3540 37mm Motore à ingranaggi cilindrici 350 motore cù ...