






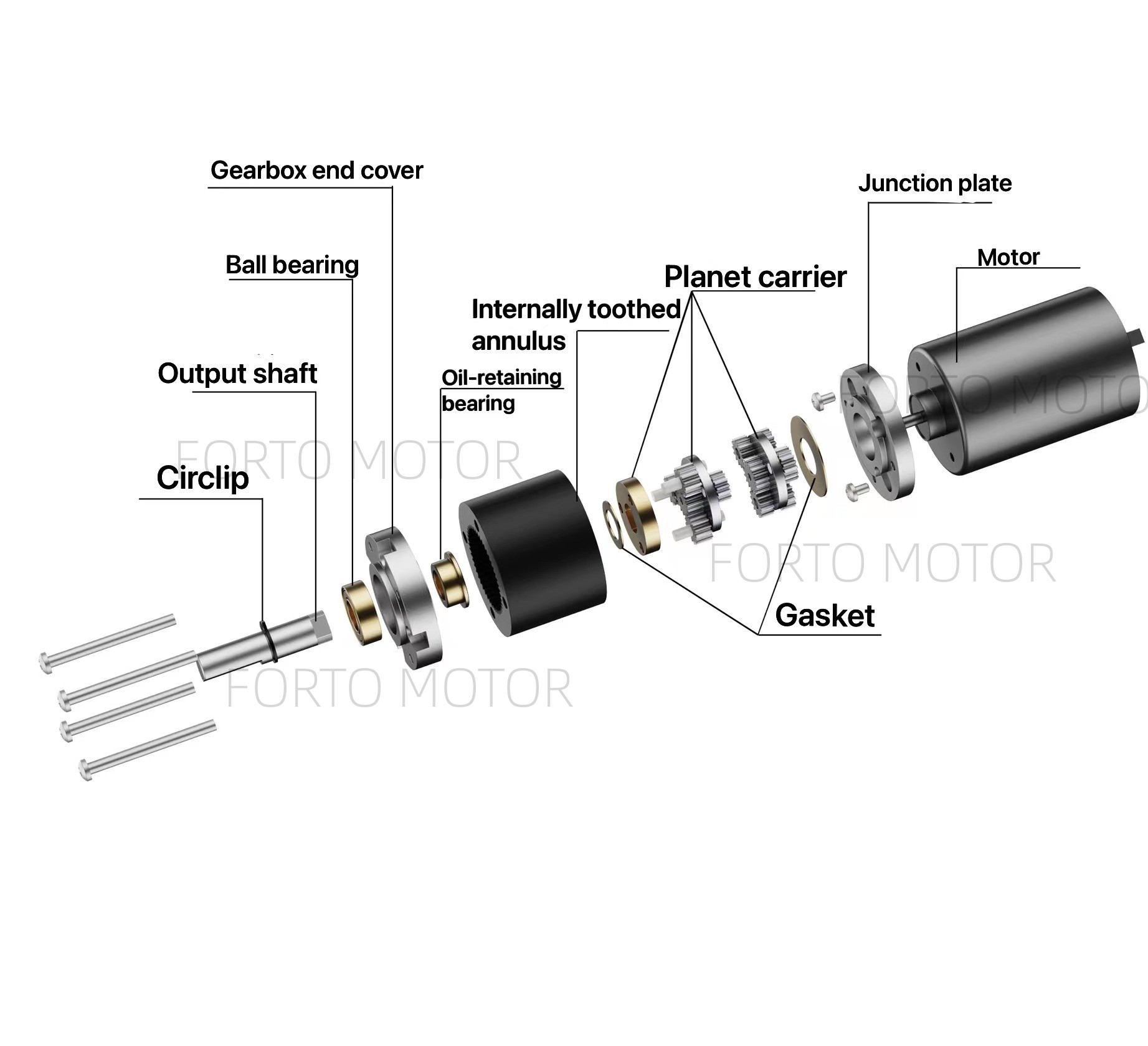
El motor reductor planetari té dues característiques. El primer és que els eixos d'entrada i de sortida són el mateix engranatge; la segona és que disposa de més de 3 engranatges planetaris, la qual cosa proporciona un major parell resultant durant els canvis de velocitat i una velocitat més suau. Arrancada (sempre té un bon parell resultant dels engranatges).
Efecte
1) Reduïu la velocitat i augmenteu el parell de sortida alhora. La relació de sortida del parell es basa en la sortida del motor multiplicada per la relació de reducció, però aneu amb compte de no superar el parell nominal del reductor.
2) La disminució de la velocitat també redueix la inèrcia de la càrrega, i la reducció de la inèrcia és el quadrat de la relació de reducció. Podeu veure que generalment els motors tenen un valor d'inèrcia.
Tipus
Els reductors generals inclouen reductors d'engranatges helicoïdals, reductors planetaris de precisió, reductors planetaris servoespecífics, reductors planetaris d'angle recte, reductors d'engranatges planetaris, reductors d'engranatges helicoïdals, reductors potents, reductors de precisió i molinets cicloides. Reductor, reductor d'engranatges sense fi, transmissió mecànica de fricció planetària contínuament variable, etc.
En general, hi ha tres tipus segons el nivell: desacceleració de primer nivell (generalment inferior a 10:1), desacceleració de segon nivell (generalment superior a 10:1 i inferior o igual a 200:1) i desacceleració de tercer nivell. .
El motor FORTO té un motor d'engranatge planetari amb diàmetres de 16 mm, 17 mm, 20 mm, 22 mm, 24 mm, 28 mm, 32 mm, 36 mm, 42 mm, 57 mm i altres diàmetres, que es poden combinar amb motors de raspall de CC i motors sense escombretes de CC.

Hora de publicació: 12-12-2023