





FT-37RGM545 Рухавік-рэдуктар з круглымі зубцамі з рэдуктарам







Асаблівасці:
У Forto мы імкнемся прадастаўляць высакаякасныя рашэнні, якія пераўзыходзяць чаканні нашых кліентаў. Нашы 37-мм круглыя цыліндрычныя рэдуктары спалучаюць у сабе перадавыя тэхналогіі, надзейнасць і ўніверсальнасць, каб забяспечыць ідэальнае рашэнне для прымянення рухавікоў.
Дадзеныя скрынкі перадач:
| Серыя шасцярні | 2 | 3 | 4 | 5 | 6 | 7 | ||||||
| Каэфіцыент памяншэння (K) | 6,8, 10 | 20, 30, 40, 46 | 61, 90 100,103 | 115、138、160、163、184、270、300 | 310、414、552、614 641, 810, 900 | 932, 1243, 1657 гг 2430, 2700 | ||||||
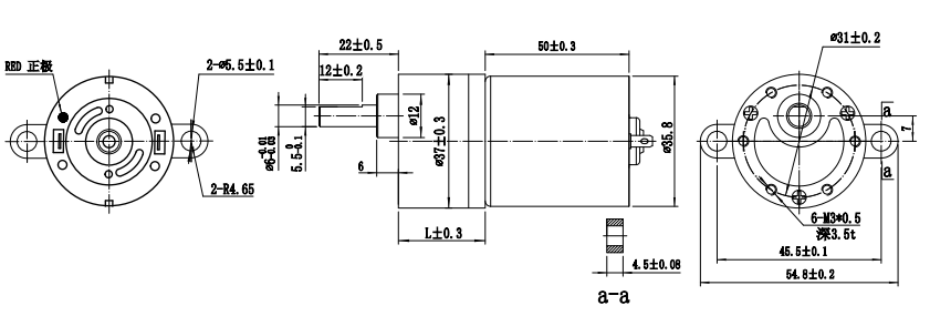
| Даўжыня скрынкі перадач L (мм) | 16.2 | 19.7 | 22.2 | 24.7 | 27.2 | 29.7 | ||||||
| Намінальны крутоўны момант(кг·см) | 1 | 2 | 5 | 6 | 8 | 10 | ||||||
| Імгненны крутоўны момант(кг·см) | 3 | 6 | 15 | 18 | 24 | 30 | ||||||
| Эфектыўнасць каробкі перадач(%) | 81% | 73% | 65% | 59% | 53% | 48% | ||||||
Дадзеныя скрынкі перадач:
| Мадэль рухавіка | Намінальнае напружанне | Няма нагрузкі | Нагрузка | Ларок | ||||||||
| хуткасць | Ток | хуткасць | Ток | Выхад | Крутоўны момант | Ток | Крутоўны момант | |||||
| V | (абароты ў хвіліну) | (мА) | (абароты ў хвіліну) | (мА) | (ш) | (г·см) | (мА) | (г·см) | ||||
| FT-545 | 12 | 4500 | 250 | 3800 | 810 | 9.7 | 160 | 3700 | 910 | |||
| FT-545 | 12 | 8000 | 550 | 6700 | 3700 | 44.4 | 295 | 11000 | 1500 | |||
| FT-545 | 24 | 4500 | 100 | 3100 | 450 | 10.8 | 230 | 1400 | 730 | |||
| FT-545 | 24 | 6000 | 120 | 4800 | 770 | 18.5 | 170 | 3300 | 770 | |||
Ужыванне
Рухавік-рэдуктар з круглымі зубцамі мае невялікія памеры, малы вага і высокую эфектыўнасць перадачы, і шырока выкарыстоўваецца ў розных мікрамеханічных прыладах. Вось некалькі распаўсюджаных сцэнарыяў прымянення:
Разумныя цацкі: мініяцюрныя рухавікі з цыліндрычнымі рэдуктарамі пастаяннага току могуць кіраваць рознымі дзеяннямі разумных цацак, такімі як павароты, размахі, штурханні і г.д., уносячы ў цацкі больш разнастайныя і цікавыя функцыі.
Робаты: мініяцюрнасць і высокая эфектыўнасць мініяцюрных рухавікоў пастаяннага току з цыліндрычнымі рэдуктарамі робяць іх важнай часткай робататэхнікі. Ён можа быць выкарыстаны для прывядзення ў дзеянне суставаў робата, руху рук і хады і г.д.
Профіль кампаніі




-

FT-37RGM3530 37-мм рухавік з цыліндрычным рэдуктарам Вось у цэнтры
-

FT-37RGM3530 37-мм рэдуктар пастаяннага току
-

FT-37RGM545 Высокі крутоўны момант з нізкім узроўнем шуму 37-мм цыліндравая перадач...
-

FT-37RGM3530 37-міліметровы рухавік з цыліндрычным рэдуктарам
-

FT-37RGM31ZY 37-міліметровы рухавік-рэдуктар з круглымі зубцамі 31ZY tu...
-

FT-37RGM3540 37-міліметровы матор-рэдуктар 350 рухавік з...