





In meganiese outomatiseringsbeweging is die motor 'n onontbeerlike komponent. In die klassifikasie van motors is die mees algemene en belangrikste motorsDC ratmotorsen stapmotors. Alhoewel hulle albei motors is, is daar groot verskille tussen die twee. Die volgende sal die verskil tussen DC-reduksiemotors en stapmotors in detail bekendstel.
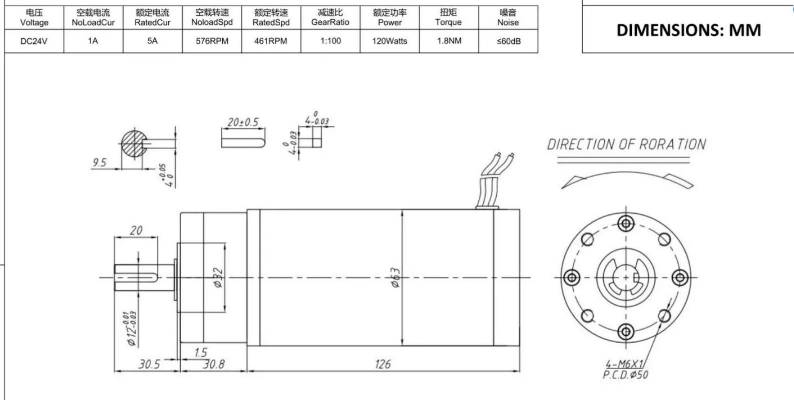
DC reduksie motor


1. Werksbeginsel
DieDC ratmotorverander die polariteit van die magnetiese veld binne die motor deur die positiewe en negatiewe stroom van die eksterne stroom, waardeur die rotasie van die motor besef word. Die uitsetas van dieDC-ratmotoris geïntegreer met 'n verkleiner om die uitsetrotasiespoed te verminder en die wringkrag van die motor te verhoog om te verseker dat die motor by die las kan aanpas.
2. Kenmerke
DieDC ratmotor het hoë doeltreffendheid, 'n wye werkreeks en lae geldwaarde. Dit is veral geskik vir toepassingscenario's wat hoë wringkrag vereis, soos meganiese vragte en outomatiese beheerstelsels, maar terselfdertyd, as gevolg van sy groot elektromagnetiese verlies, vereis onderhoud en foutsporing sekere professionele vaardighede.
Stapmotor
Werksbeginsel 1.
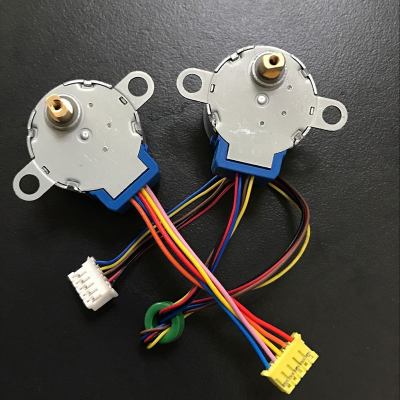
'n Stapmotor dryf die motor om teen 'n sekere hoek te draai deur voortdurend die polariteit van sy elektromagnetiese veld te verander wanneer dit aangeskakel word. Dit word in twee tipes verdeel: een is 'n enkelfase-stapmotor en die ander is 'n driefase-stapmotor. Die uitsetas van die stapmotor word gekombineer met 'n omsetter of 'n verkleiner om die hoek en spoed te beheer.
Kenmerke
Stapmotors het hoë presisie, presiese beheer, en kan outomaties herbegin en begin. Hulle is veral geskik vir toepassingscenario's met hoë-presisiebeheervereistes, soos digitale drukkers, laserskandeerders en LCD-skerms. Terselfdertyd, aangesien die stapmotor-dryfas meganiese geraas het, is stapmotors egter nie die beste keuse wanneer lae-geraas werking vereis word nie.
Die verskil tussen DC-reduksiemotor en stapmotor
| Verskille | DC ratmotor | Stapmotor |
| Werksbeginsel | Verander die polariteit van die magnetiese veld binne die motor deur positiewe en negatiewe stroom toe te pas
| Deur voortdurend die polariteit van sy elektromagnetiese veld te verander wanneer dit aangeskakel word, word die motor aangedryf om 'n sekere rotasiehoek te produseer |
| Uitset as | Geïntegreerde verkleiner om die uitsetrotasiespoed te verminder en die wringkrag van die motor te verhoog | Gekombineer met 'n omskakelaar of verkleiner, kan dit die hoek en spoed beheer |
| Toepassing scenario's | Geskik vir scenario's wat hoë wringkrag vereis, soos meganiese vragte en outomatiese beheerstelsels | Geskik vir hoë-presisiebeheer en herbegin selfbegin toepassingscenario's, soos digitale drukkers, laserskandeerders, LCD-skerms |
| Voordele | Hoë doeltreffendheid, wye werkreeks, lae geldwaarde | Hoë presisie, presiese beheer en deurlopende herbegin self |
| Nadele | Hoë elektromagnetiese slytasie, vereis professionele vaardighede vir instandhouding en probleemoplossing | Die dryfas het meganiese geraas |
Gevolgtrekking
Kortom,DC ratmotors en stapmotors het hul eie voordele en nadele, en hul toepassingscenario's verskil ook. Vir sommige scenario's wat hoë buigsaamheidsbeheer en hoë presisie vereis, soos sweisrobotte en CNC, word trapmotorbeheer oor die algemeen gebruik, terwyl scenario's wat vinnige, doeltreffende, betroubare en nie baie hoë presisievereistes vereis nie, soos monteerlyn vervoerbande, is word gewoonlik deur DC-reduksiemotors beheer.
Postyd: 18 Okt-2024